
工艺介绍
随着消费者对于视听要求的提升,电视机的尺寸越来越大,像素也随之越来越多,导致出现像素坏点的几率逐渐提高。
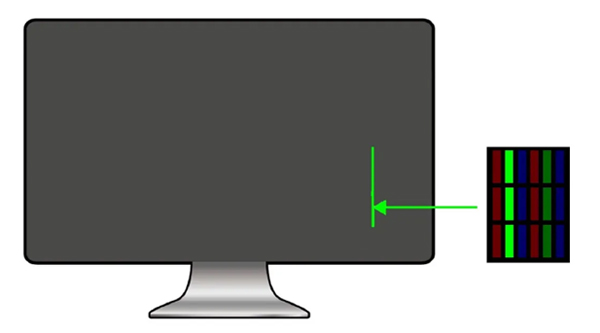
面板的每个像素由红绿蓝三元色组成,目前较为常见的坏点,是颜色亮度高于正常值的像素亮点,例如出现绿色坏点(如下图所示),因此需要进行坏点的修复。
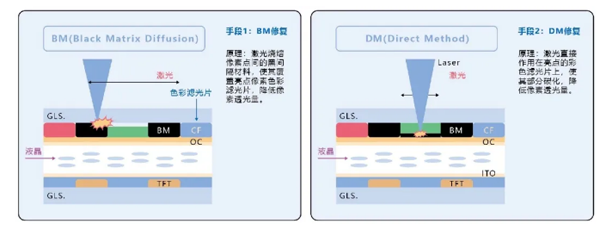
目前最常见的修复手段有两种,都是通过激光降低亮点像素的透光量。分为BM修复和DM修复。BM修复是通过激光热熔像素点之间,间隔的黑色材料,使其覆盖在像素点上,以降低其透光量;DM修复是激光直接作用在像素点上,使其部分碳化,降低其透光量。
激光修复设备的基本流程:首先由相机检测坏点,记下坐标后再通过激光进行逐个修复,最后由检测系统查一遍。要求在上千万,乃至上亿个微小像素点中快速、准确地找到所有坏点,并且快速修复。
课题
01、如何确保大型龙门机构的运动精度?
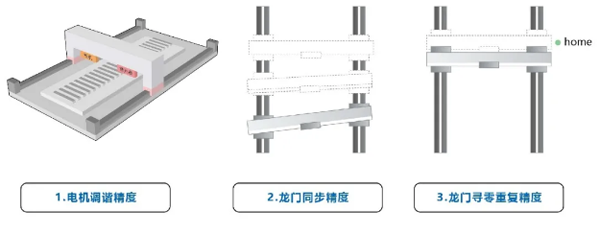
龙门机构的运动精度,受到电机调谐的精度、龙门运动时的同步精度以及龙门寻零重复的精度等因素影响,可能造成最终动作的精度不足。
02、如何实现多轴插补时,高频率、高精度的监测?
目标:快速检测 速度100mm/s,精度0.2μm
解决方案
1、同步误差消除
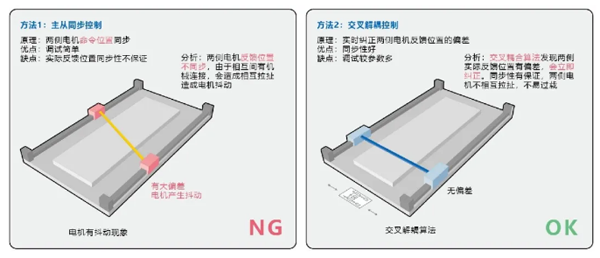
目前较为常见的方式,主要通过两侧电机的命令位置同步,虽调试简单,可由于相互间有机械连接,会造成相互拉扯造成电机抖动。
因此,我们采用交叉解耦控制,通过实时纠正两侧电机反馈位置的偏差,同步性有保证,两侧电机不相互拉扯,也不易过载。
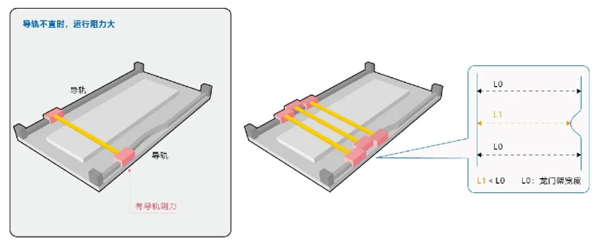
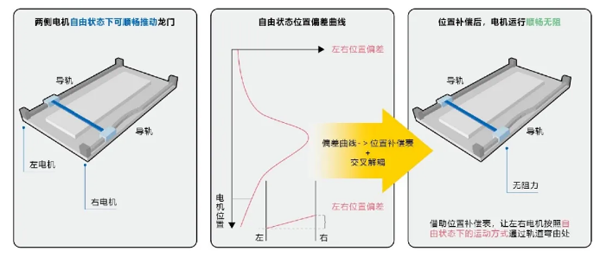
2、机构误差消除
如果导轨笔直且平行,运行畅通无阻;一旦存在弯曲,则会出现阻力。由于交叉解耦强制龙门机构横向通过,所以依然会造成电机抖动。通常我们在现场所遇到的龙门机构,很难保证完全的笔直,因此仍然需通过控制方式的优化来寻找突破口。
我们让龙门在自由的状态下,用手推动龙门并使其在轨道上全程运动,此时采集两侧电机的位置偏差曲线,然后将这个偏差曲线的数据导入至运动控制器的位置补偿表中,对其进行位置补偿。在补偿表和交叉解耦的作用下,龙门便可以在导轨弯曲处畅通无阻的运行。
3、龙门寻零的误差消除
目前较为常见的龙门回零方式有两种,第一种,是主电机单边回零,这种方法简单,但是从电机的重复精度差。第二种,是主电机回零时从电机锁存零位,这种方法虽然可以保证重复精度,但对零点传感器的安装位置有要求。
我们采用的方案,是主从电机分别回零,不仅重复精度高,且无传感器安装限制。
4、面板的不间断高速检查
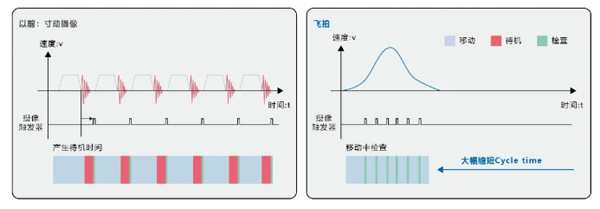
在面板修复前,需要对面板进行高频、连续、等间距的拍摄检测,目前较为常见的方式有两种:1、寸动摄像,此方式存在较明显的停顿,整体拍摄时间冗长;2、连续摄像,此方式虽然拍摄速度能够达到要求,可容易产生曝光、画像不清晰等精度上的课题。
因此,我们采用欧姆龙独特的飞拍技术,能够在无停顿、连续检查的同时,确保检查的高精度,相比原本的检测方式,节拍时间缩短了70%。
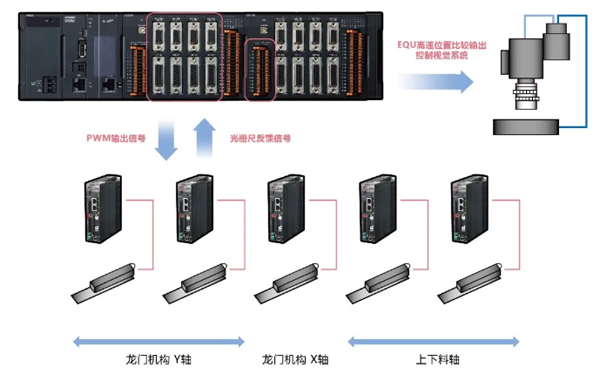
控制系统
实现价值
1. 大型龙门机构运动速度与精度的保证:
From 速度600mm/s时,跟随误差<±10μm
To 速度800mm/s时,跟随误差<±3.7μm
2、 多轴插补时高频率、高精度飞拍:
From 速度100mm/s时,检查精度0.2μm
To 速度100mm/s时,检查精度0.15μm
【经营层】
■ 应对当前液晶面板不断高涨的需求,以及市场的扩大,通过运动控制与检测的优化,解决激光坏点修复的难点,设备速度与精度得到显著提升,打造行业Top竞争力。
【管理层】
■ 欧姆龙可编程多轴运动控制器,兼容第三方产品,使客户拥有更多的选择空间,例如选择更为经济的电机与驱动器后,可提高设备价格优势。
■ 运动机构的定位以及检查的速度、精度提升,完全建立在控制系统与程序的优化,无需更改机械结构和运动时间,导入时间更快且成本更低。
【工程师层】
■ 设备速度与精度都得到显著提升,从600mm/s 精度±10μm提升至800mm/s 精度±3.7μm。
■ 欧姆龙机械自动化控制器NJ/NX系列,内置飞拍技术功能块,调试简单,开发周期短。
(转载)

