
EtherCAT是一个开放式的工业以太网系统,它建立在以太网技术(IEEE 802.3)基础之上,具有数据传输速率高、响应时间短和实时执行的性能特点,它已成为}EC/PAS 62407国际标准,是IS015745-4的一部份·并正在集成到IEC61158 、 IEC61784和IEC61800-7标准之中。
EtherCAT是基于集束帧方法:EtherCAT主站发送包含网络所有从站数据的数据包,这个帧按照顺序通过网络上的所有节点,当它到达最后一个帧,帧将被再次返回。当它在一个方向上通过时节点处理帧中的数据。每个节点读出数据并将响应数据插入到帧。为了支持100Mbit/s的波特率,必须使用专用的ASIC或基于FPGA的硬件来高速处理数据。因此,EtherCAT网络拓扑总是构成一个逻辑环。即使从主干上分支出的节点也必须以这种方式进行连接,实际上只是通过增加一个双向连接点来进行集束帧在分支线路上的前后方向输送。
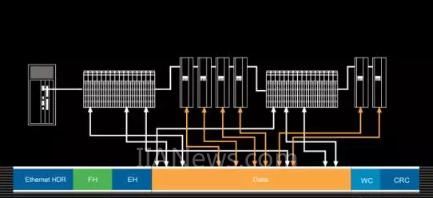
EtherCAT帧结构:所有的给每个节点的指令都被包含在一个EtherCAT数据报文的有效载荷区。每个EtherCAT帧由一个头和几个EtherCAT的命令构成。每个命令包括它自己的头,给节点的指令数据,及一个工作计数器。高达64KB的可配置地址空间来配置从站。寻址处理通过自动递增方式:每个从站可以处理16位地址域,从站也可以在网络初始阶段进行指派方式来实现分布式的站点寻址。
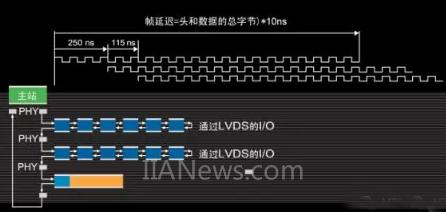
EtherCAT过程同步:每个从站连接由主站提供的一个类似于IEEE1588的实时时钟技术进行同步。从站设备可以是实时也可以是非实时机制,这更多取决于硬件。基于实时时钟,控制信号可以高精度同步。在物理层,EtherCAT协议不仅在以太网上运行,也可以采用LVDS(低压差分信号传输)。这个标准被Beckhoff使用在其端子技术上,典型的是采用带有标准以太网接口的PC作为一个EtherCAT主站。相较于POWERLINK或PROFINET等协议,EtherCAT仅贯穿OSI 7层模型中的1-3层,因此,为了实现与其它系统相同的应用功能,必须加载额外的协议层(CoE,EoE)。
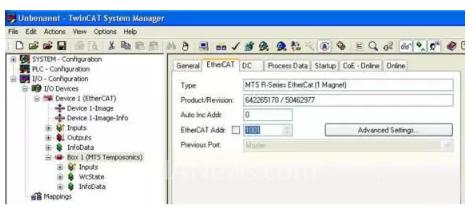
MTS Temposonics® R-系列EtherCAT绝对值输出位移传感器连接到一个EtherCAT网络系统是非常容易的·通过系统管理软件(例如BECKHOFF公司的TwinCAT,用户可以从XML文件(随传感器提供)中得到传感器的所有参数,而在传感器上无须再做任何设置。
MTS Temposonics® R-系列EtherCAT绝对值输出位移传感器有两个工作模式版本供选择:
1〉E101:1一5个磁铁测量,最多测量5个磁铁的的位置和速度
2〉E102:1一20多个磁铁测量,最多测量20个磁铁的位置
MTS Temposonics® R-系列EtherCAT绝对值输出位移传感器应用TwinCAT软件组态为网络节点的编程画面:
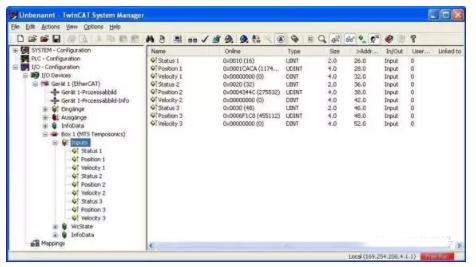
MTS Temposonics® R-系列EtherCAT绝对值输出位移传感器在TwinCAT软件中配置为3个磁铁测量的输入数据区的编程画面:
(转载)

