
设备概况
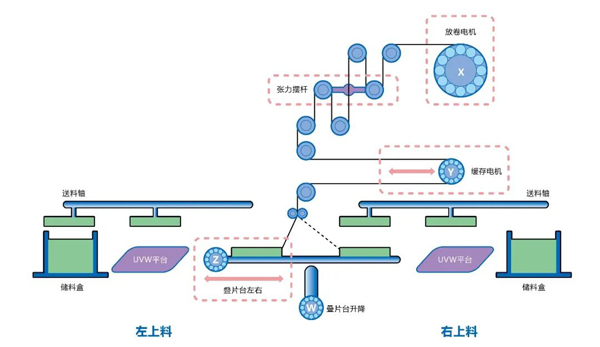
Z型叠片机是方形锂电池生产的关键设备之一。一般由十个机构组成,分别为:放料机构、正极料盒、负极料盒、正极二次定位机构、负极二次定位机构、正极送料机构、负极送料机构、叠片台、贴胶机构、下料机构。
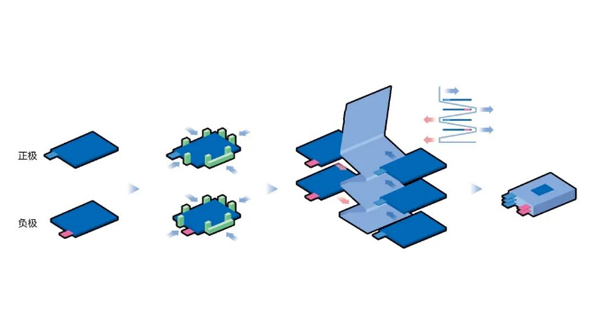
工艺简介
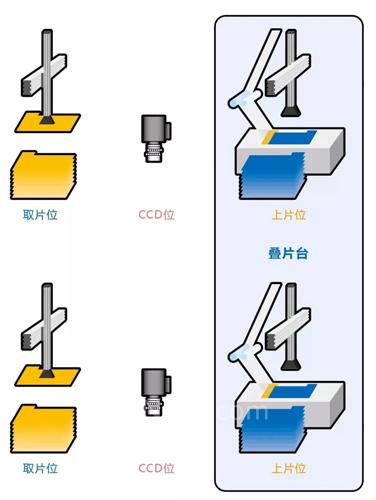
叠片机将正、负极片装入料盒中,机械手左右运动,在正、负极料盒中拾取极片,经二次定位,交替将正、负极片放在叠片台上。隔膜主动放卷,叠片台带动隔膜左右往复移动形成Z字叠绕。叠片完成后,按照设定长度切断,自动送出人工贴胶。
课题
① 易产生振动
设备中多个轴(上料平移、叠片台移动等等)都是单轴PTP控制,每个轴移动时间将直接影响整机速度,高速下设备易出现振动等问题。
② 叠片平移距离长
原先上片一般采用双伺服或者双动子的直线电机,因此CCD平台和叠片台上片位置在一条直线上,叠片台左右上片位置间距一般固定不可调,且考虑大产品因此距离较远,影响整机效率。
③ 检测时间久
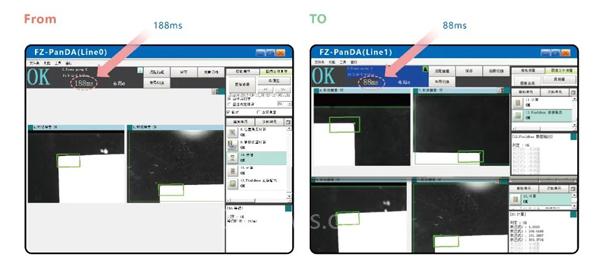
对极片产品进行位置检测以及数据传输过程中,单个工位的检测时间在200ms左右,且在切换工位阶段需要通过信号传输切换程序;无法满足时间上的高速要求。
④ 张力波动大
叠片工艺由于是频繁起停控制,同时隔膜在叠片台左右移动时呈非线性变化,传统通过编码器采样的方式或许变化曲线,张力波动较大。
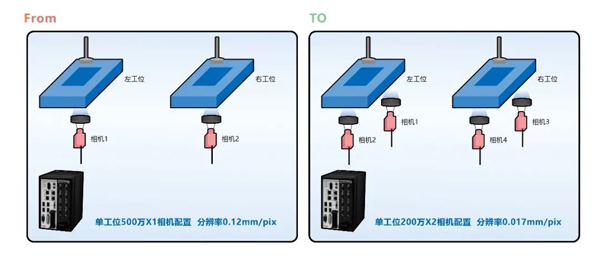
⑤ 视觉检测精度不足
叠片设备极片产品长边尺寸为300mm左右,使用单个相机拍摄整个产品,在使用500万像素相机下,相机分辨率只能达到0.12mm/pix。
解决方案
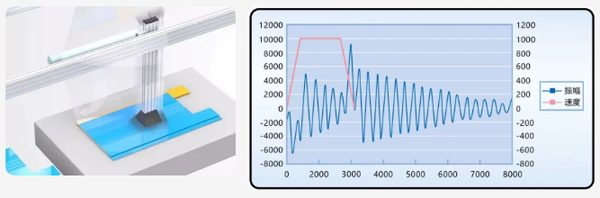
01、抑振技术
通过欧姆龙独有的抑振技术,可以有效解决高速移动下,轴因惯性而带来的振动问题,并在相同移动距离的前提下,缩短移动时间和等待时间,提高整机效率。
FROM
高速移动、启停后振动严重
造成叠片质量低,效率低
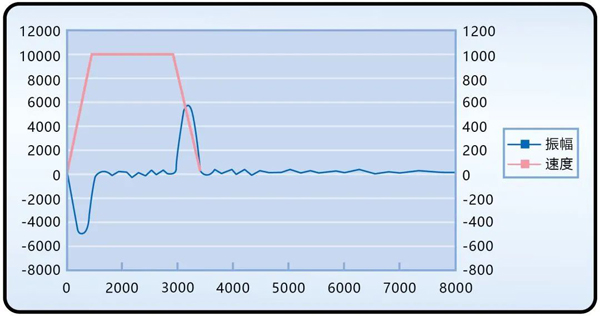
TO
振动幅度减小,振动时间减小
提升叠片质量和效率
02、机器人技术
上片位动作由欧姆龙独有的机器人技术完成,这样叠片台上片位置就可以根据实际需要随意变动,可以有效缩短叠片台移动距离,提升整机效率,还可以完成极片位置纠偏功能。
03、高速视觉技术
使用高速4核FH视觉控制器,一台能够同时实现多台相机独立工作以及独立数据传输,实现每个工位检测时间都在100ms以下,实现视觉部分“0”节拍浪费。
04、张力技术
通过数学模型的方式,计算并获取叠片移动与缓存直线的位置关系,从而有效的提高同步性,实现张力控制,降低张力波动。
05、高精度检测技术
对左右双工位,各使用两个200万相机,对极片的斜对角进行拍照检测,视野为34mm*17mm,相机分辨率可以达到0.017mm/pix。
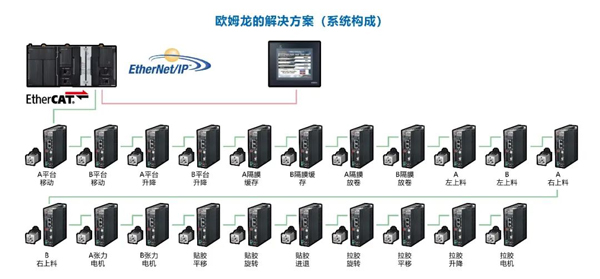
系统配置
超高速视觉系统FH系列对位置数据进行采集,再通过NX1系列机械自动化控制器,自带的叠片算法,得出机器人的气爪叠片位置。机器人全部由拥有高负载、长臂展的欧姆龙SCARA组成,而伺服驱动全部采用欧姆龙1S系列,可实现对动作曲线的精准控制。
国内首屈一指的Z型叠片机
FROM
生产效率:1.5秒/片
隔膜对齐度 ±0.6mm
极片对齐度 ±0.5mm
TO
生产效率:0.6秒/片
隔膜对齐度 ±0.2mm,隔膜无形变
极片对齐度 ±0.1mm
【经营层】
◾ 打造国内首屈一指的Z型电池叠片机,引领未来行业发展趋势!
◾ 结合多项尖端技术,各项性能领先,设备竞争力向上!
【管理层】
◾ 通过抑振、机器人,张力等技术导入,大幅提升整机的运动节拍。
◾ 高精度检测技术的导入,确保隔膜、极片的对齐度,品质提升。
【工程师层】
◾ 全系统由欧姆龙提供技术支援,后期维护有保障。
◾ 通过一款软件对所有设备进行整合控制,缩短开发时间。
欧姆龙始终致力于解决生产中出现的课题,推动生产革新。尤其是欧姆龙智能制造理念i-Automation!中的“Integrated”(控制升级),致力于为制造业革新创出提供核心技术力,为客户创造更简单更灵活的制造现场,实现高速・高精度生产,赋予生产更多智能。
(转载)

