
Roboshop Pro ® 是 Seer Robotics ® (上海仙知机器人科技有限公司) 开发的用于移动机器人应用的专业级客户端软件。本客户端软件需要配合由【仙知机器人® 】 提供的 【移动机器人】或【控制器】使用。
上期介绍了Roboshop Pro使用入门(七)——任务链二,本期将介绍Roboshop Pro 使用入门(八)——任务链的操作示例;后续还会持续更新Roboshop Pro的使用,敬请关注!
操作示例
例1:
保存新建的任务链,并让机器人循环执行。
任务链的内容为:
①让机器人路径导航到LM1;
②机器人到达LM1之后,以30°/s的角速度旋转360°;
③控制机器人路径导航到LM2;
④控制机器人自由导航到LM1。
操作步骤:
1.1 在【任务链】操作模块,点击【新建任务链】按钮,新建任务链,如下图所示。

1.2 选中新创建的任务链,点击【重命名】按钮,按照要求将其重命名为 [DemoTaskList001],如下图所示。

1.3 选中新创建的任务链,在【任务】操作模块点击【新建任务】按钮,依次添加三个任务,并在任务描述区域输入相关的任务描述,如下图所示。

1.4 选中编号为【1】的任务,在右边的【组】操作模块中点击【添加组】按钮,依次添加两个【组】,如下图所示。

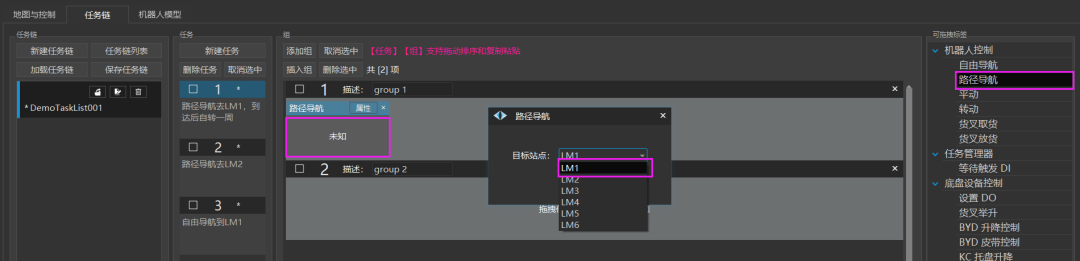
1.5 从右侧的【可拖拽标签】操作模块中选中【路径导航】标签,并拖动到【group1】中,然后点击新添加的【路径导航】标签的【未知】部分,添加【目标站点】为 [LM1],如下图所示。
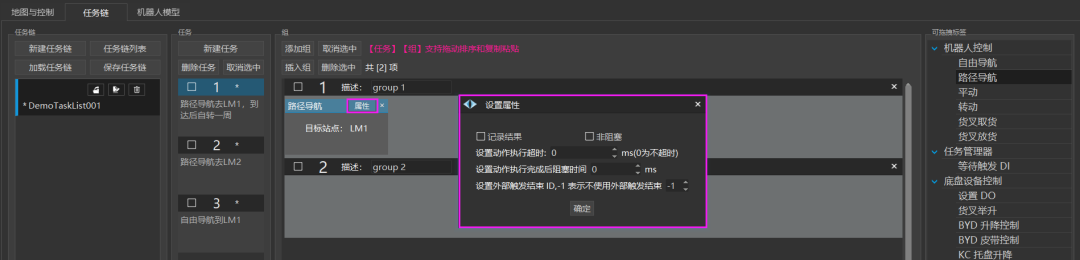
注:点击标签右上角的【属性】按钮,可以对当前标签对应的动作进行高级设置,如下图。
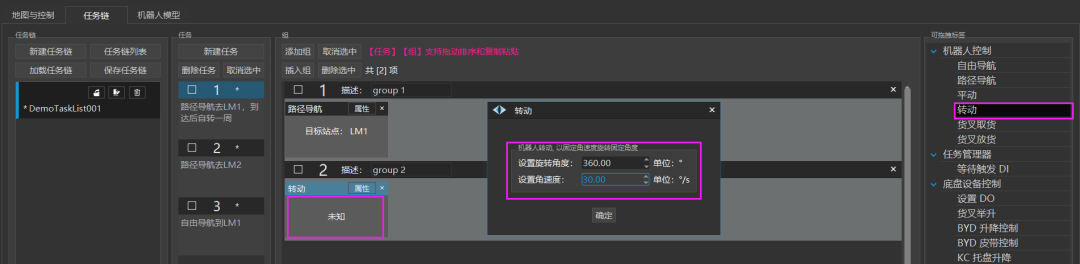
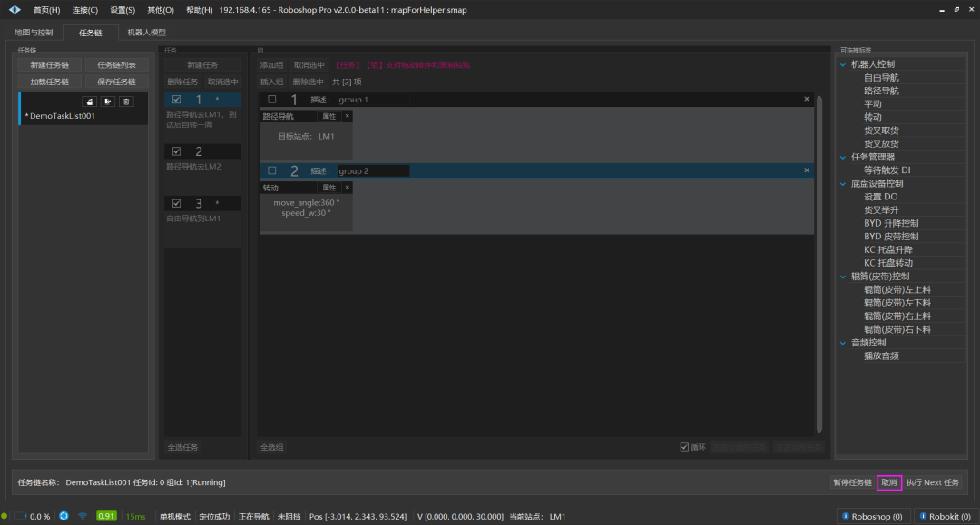
1.6 从右侧的【可拖拽标签】操作模块中选中【转动】标签,并拖动到【group2】中,然后点击新添加的【转动】标签的【未知】部分,设置【旋转角度】为 [360°],设置【角速度】为 [30°/s]。
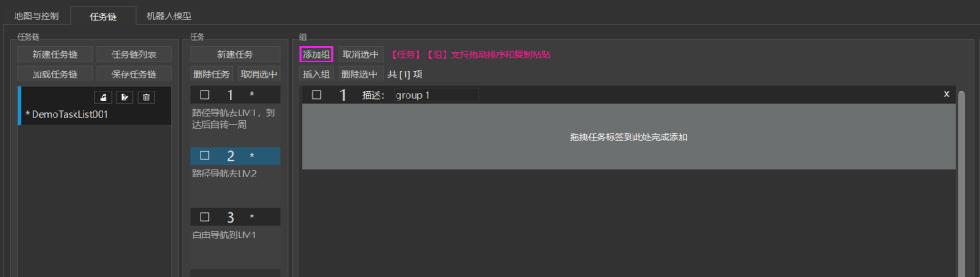
1.7 选中编号为【2】的任务,在右边的【组】操作模块中点击【添加组】按钮,添加一个【组】,如下图所示。
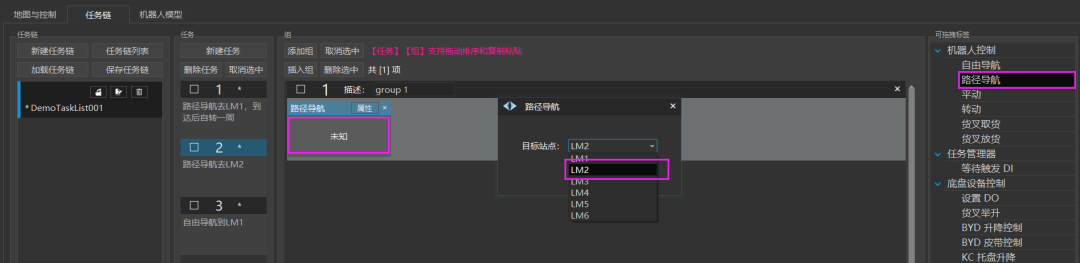
1.8 从右侧的【可拖拽标签】操作模块中选中【路径导航】标签,并拖动到【group1】中,然后点击新添加的【路径导航】标签的【未知】部分,添加【目标站点】为 [LM2],如下图所示。
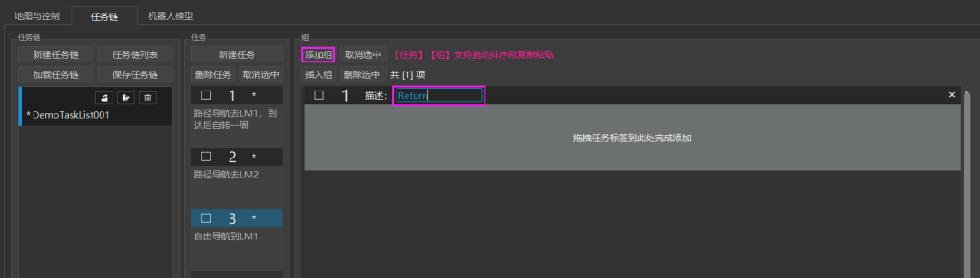
1.9 选中编号为【3】的任务,在右边的【组】操作模块中点击【添加组】按钮,添加一个【组】,并将组【重命名】为 [Return],如下图所示。
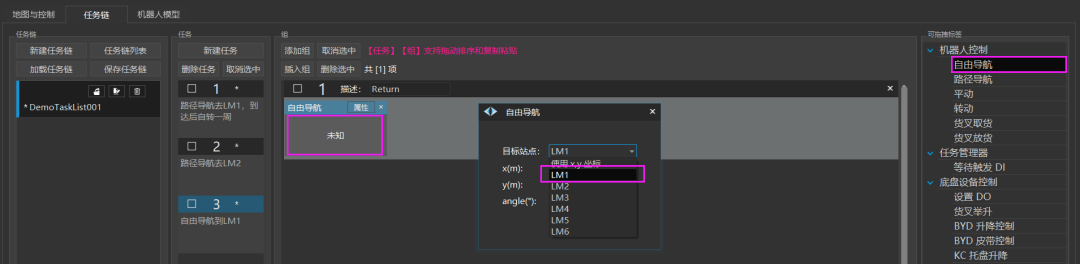
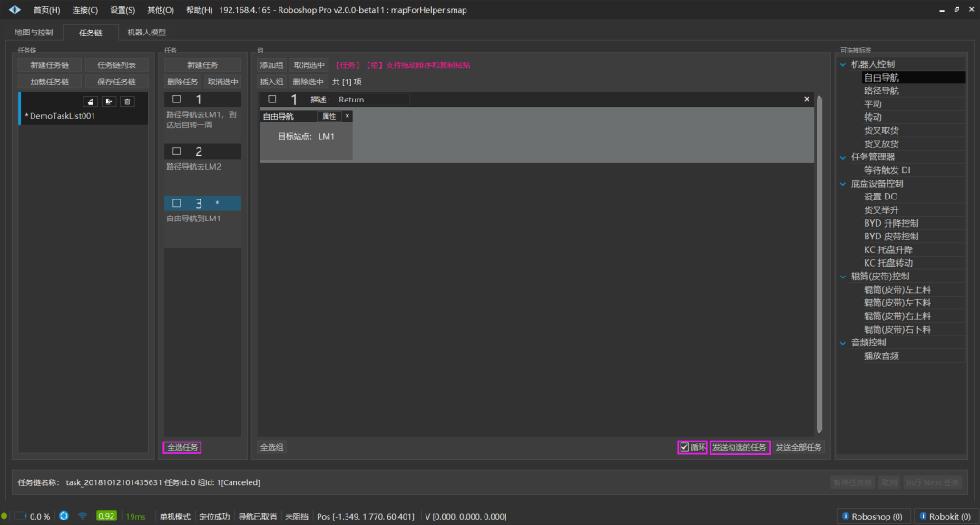
1.10 从右侧的【可拖拽标签】操作模块中选中【自由导航】标签,并拖动到【Return】中,然后点击新添加的【自由导航】标签的【未知】部分,设置【目标站点】为 [LM1],如下图所示。
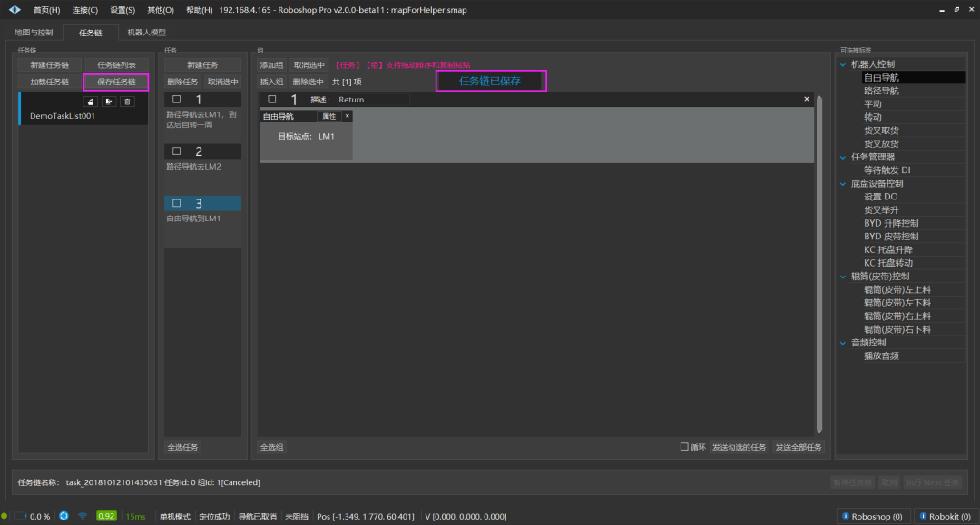
1.11 点击【任务链】操作模块中的【保存任务链】按钮,或者按住【Ctrl+S】,即可保存当前任务链到默认路径下,如下图所示。
1.12 点击【任务】操作模块中的【全选任务】按钮,然后勾选组操作模块中的【循环】选项,最后点击【发送勾选的任务】按钮即可,如下图所示。
例2:
控制机器人终止正在执行的【例1】的任务链。
操作步骤:
2.1 当机器人正在执行【例1】的任务链时,点击下图所示的【取消】按钮,即可控制机器人【终止】执行当前的任务链。
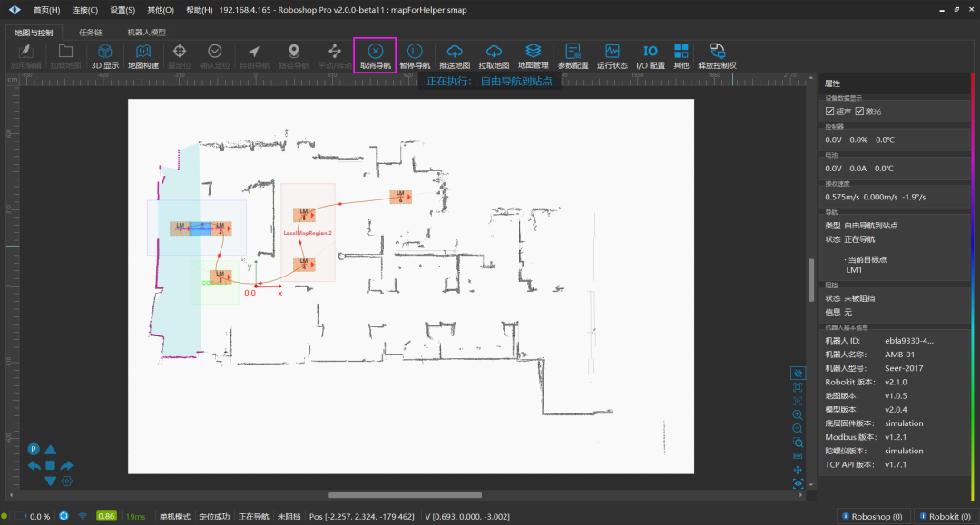
或者,当机器人正在执行任务链时,切换到【地图与控制】模块,点击如下图所示的【取消导航】按钮,也可达到预期的结果。
(转载)

