
Roboshop Pro ® 是 Seer Robotics ® (上海仙知机器人科技有限公司) 开发的用于移动机器人应用的专业级客户端软件。本客户端软件需要配合由【仙知机器人® 】 提供的 【移动机器人】或【控制器】使用。
上期介绍了Roboshop Pro使用入门(二)——查看基本信息与同步状态,本期将介绍Roboshop Pro使用入门(三)——构建地图与地图修改;后续还会持续更新Roboshop Pro的使用,敬请关注!
构建地图
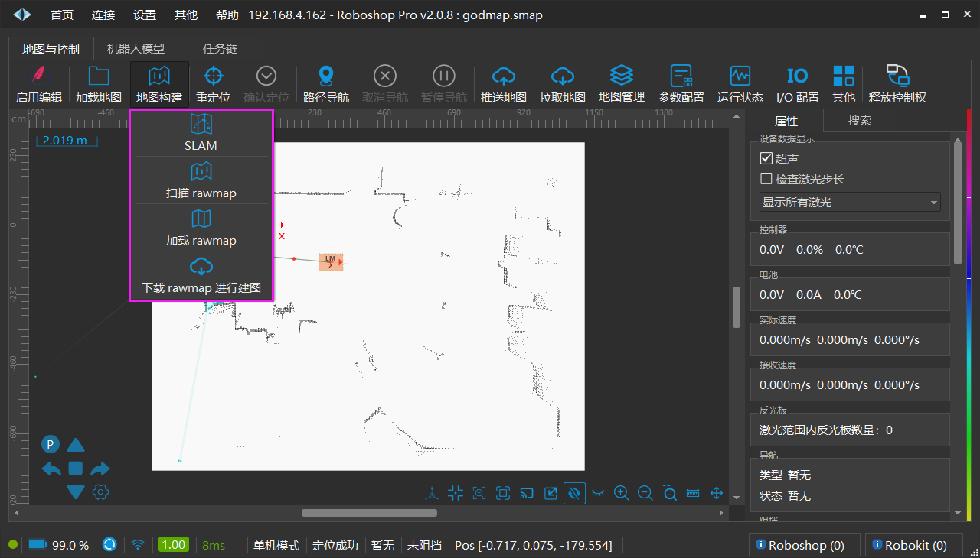
打开Roboshop Pro ,成功连接机器人后,双击机器人进入【地图与控制】界面。点击模块工具栏中的【地图构建】,会弹出【地图构建】的所有方式。
今天给大家介绍一下使用【SLAM】的方式进行地图构建:
第一步:点击 【地图构建】→【SLAM】,在弹出的界面中不做任何参数修改(一般情况下不需要修改该界面的参数),点击【确定】按钮。

第二步:使用键盘按键 W(前)A(左)S(后)D(右)进行机器人控制,使得机器人在场景中进行运动,完成扫图后点击右上角的【完成扫图】按钮。

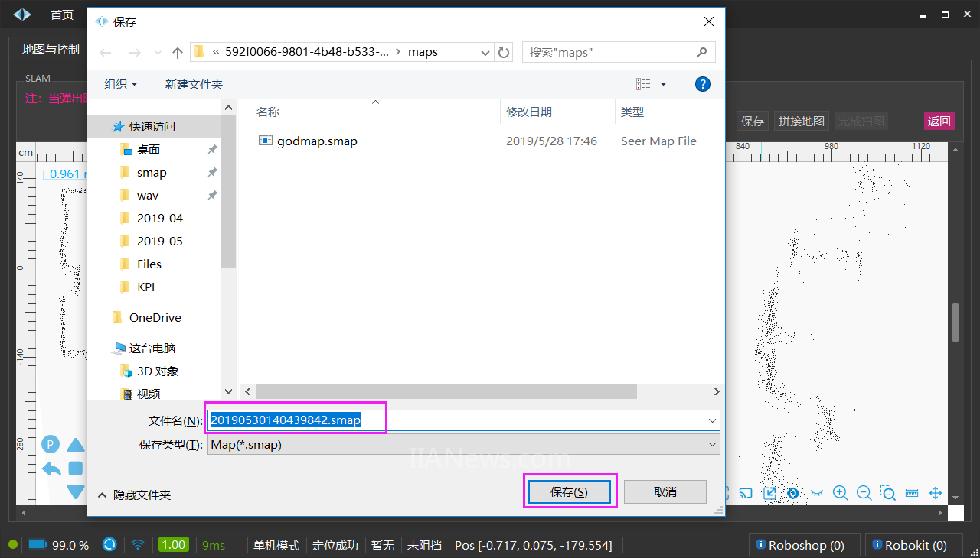
第三步:等待建图完成,然后点击右上角的【保存】按钮。

第四步:在所弹出的界面中选择期望路径和输入期望名称进行地图保存。
第五步:保存成功后会弹出对话框询问是否打开,选择【推送地图并打开】,即可打开刚才所构建的地图且将该地图进行同步,可以直接 进行使用。此时地图构建部分已经完成。
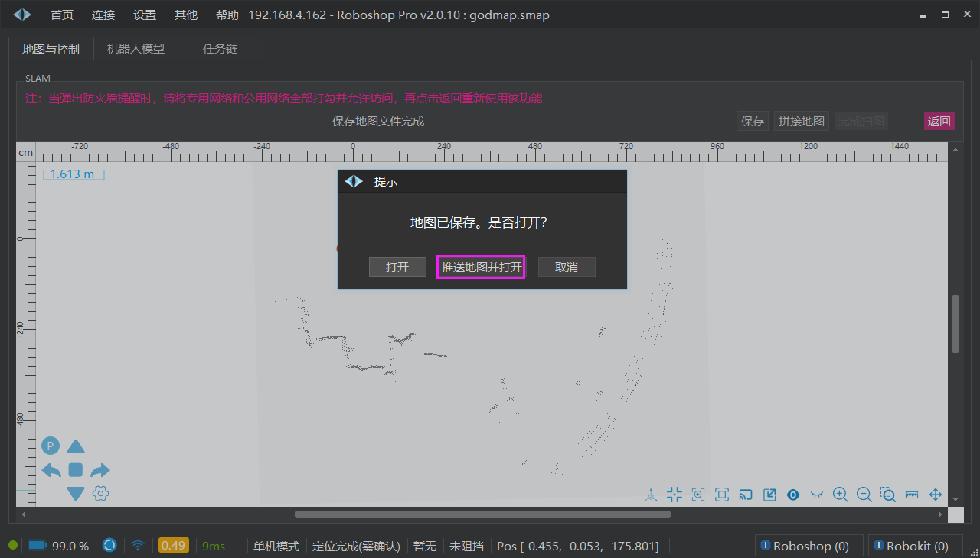
注:若选择【打开】,则打开刚构建的地图,并会弹出地图数据不一致的对话框,根据需求自行选择【推送地图】、【拉取地图】或者【取消】。
地图修改
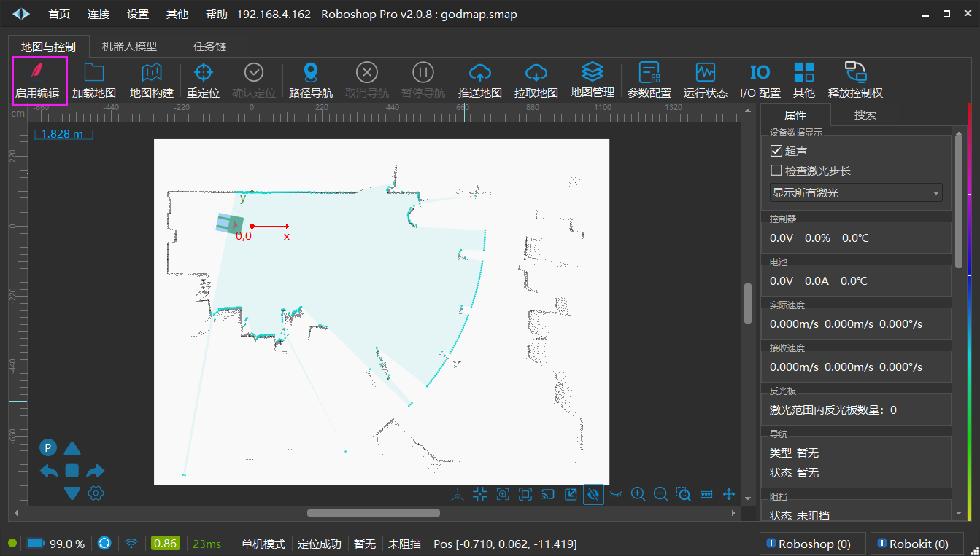
【地图构建】完成后(或打开一张地图),如需要对地图进行修改,可通过点击模块工具栏中的【启用编辑】进入地图编辑页面。
下面介绍如何添加 【站点】 和 【路径】 :
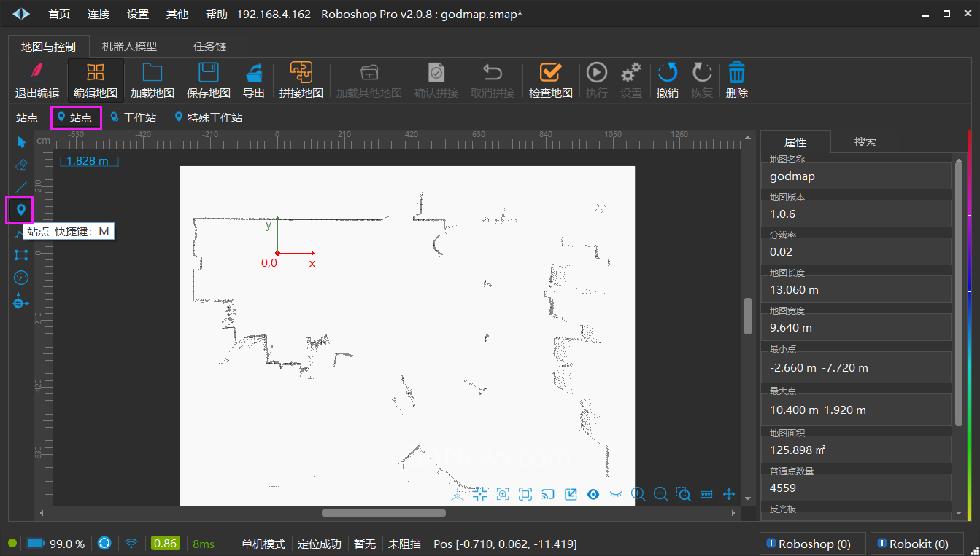
(1)点击工具栏中的【站点】工具,在上下文工具栏中选择【站点】工具。
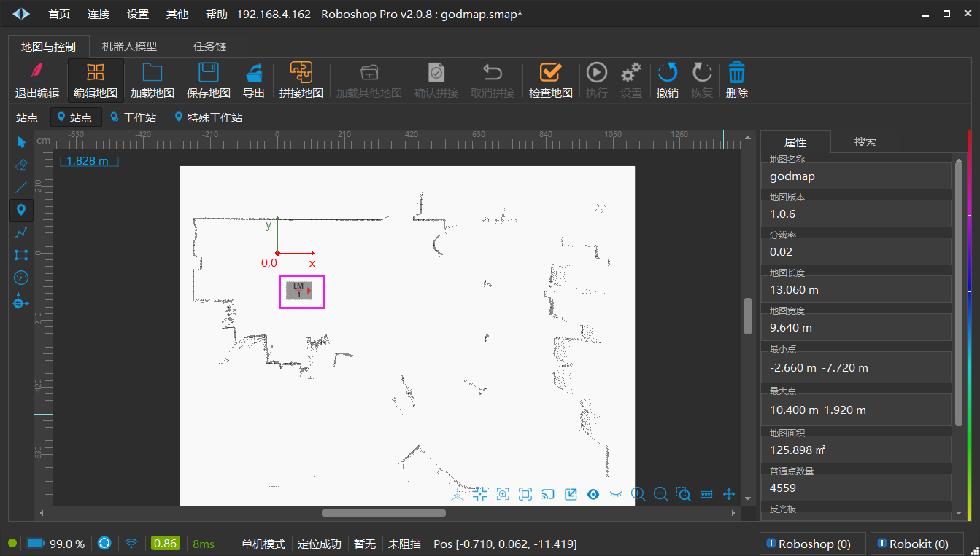
(2)移动鼠标到工作空间中,点击进行站点的添加,如下图为所添加的一个站点。
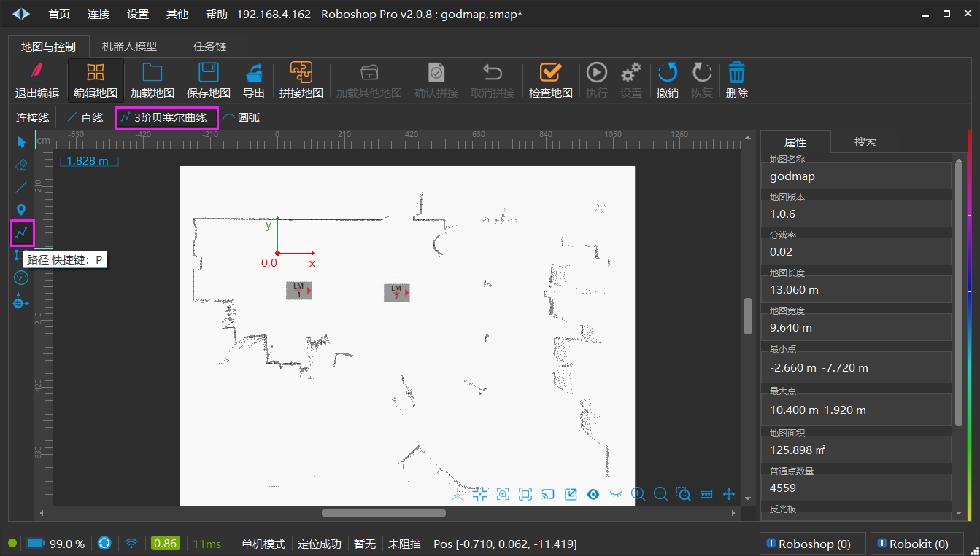
(3)继续添加一个站点,然后点击工具栏中的【路径】,选择上下文工具栏中的【三阶贝塞尔曲线】。
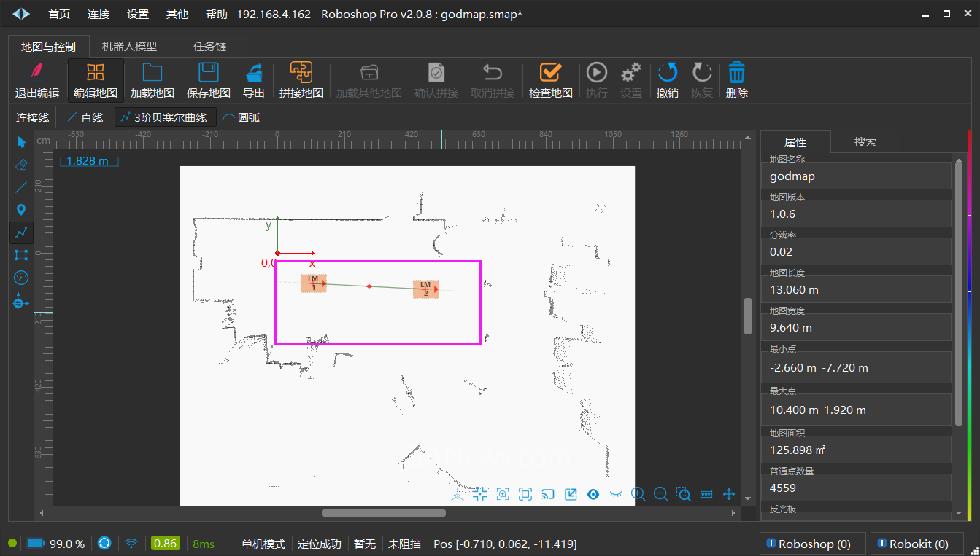
(4)将鼠标移动到LM1点,点击并拖动到LM2点上,至此站点添加和连线就完成了。
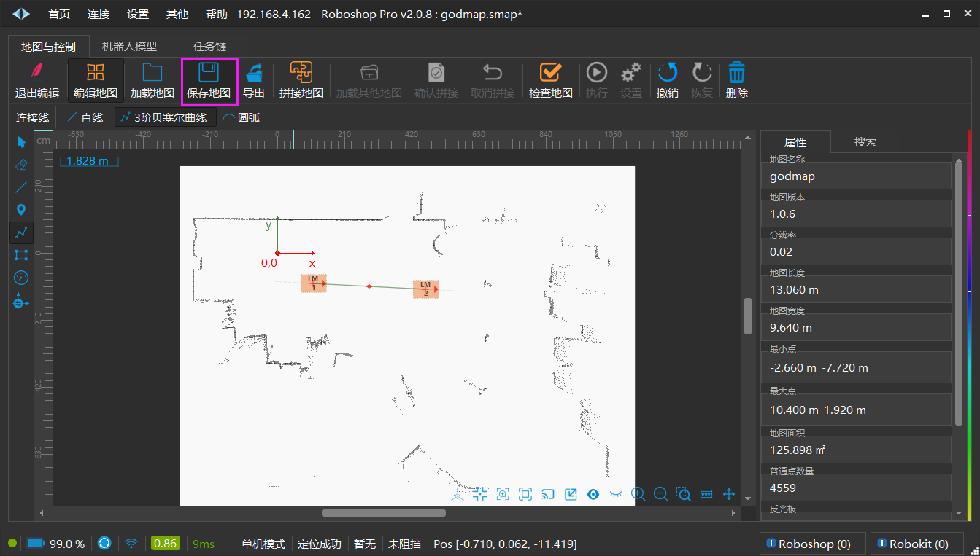
(5)若地图修改完成,请点击模块工具栏的【保存地图】按钮,此时 Roboshop Pro 会检查地图的正确性。
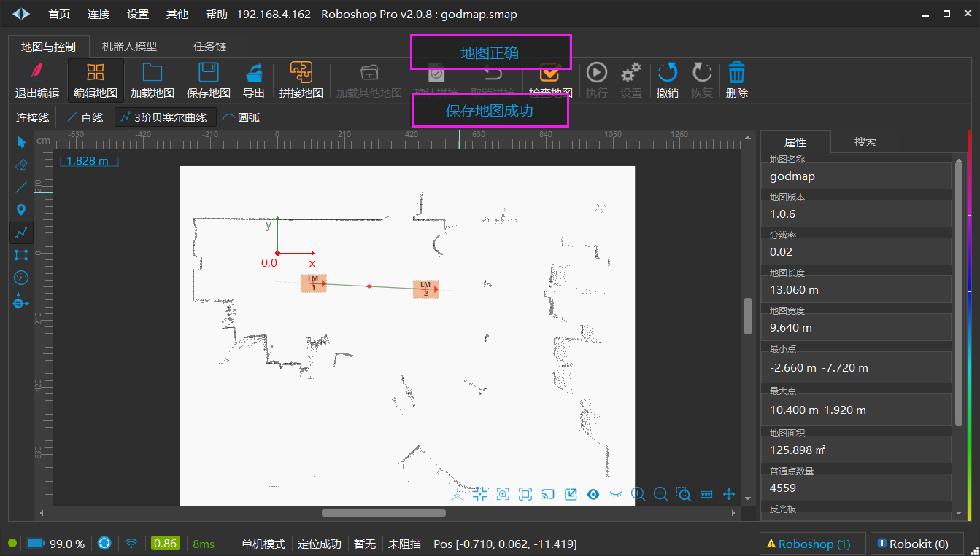
A. 如果地图没有问题,则可以成功保存地图并可以看到 [地图正确] 和 [保存地图成功] 的提示信息。
B. 如果地图存在问题,则地图不能成功保存,且可以看到 [错误:保存失败,请先处理以下错误] 的提示信息和弹出一个 【检查结果】 的弹框。
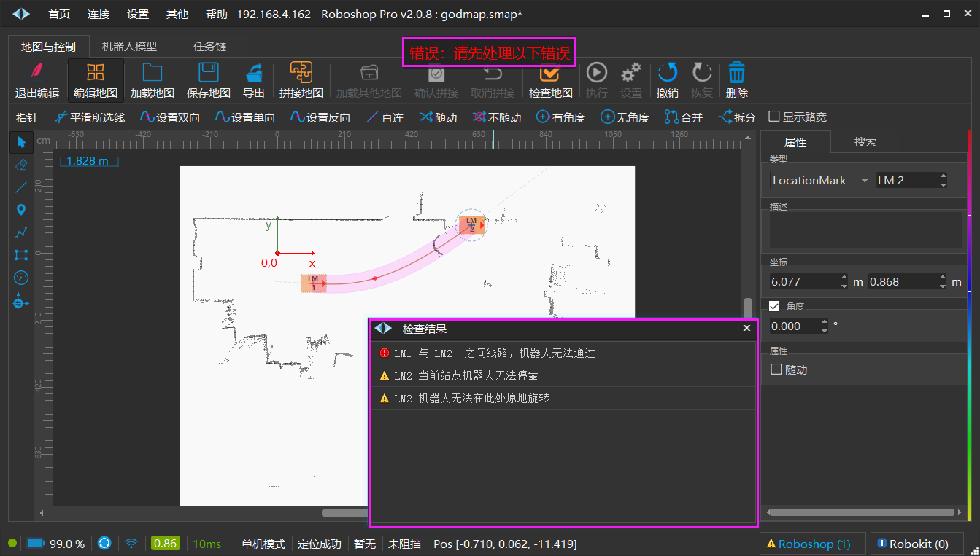
根据检查结果中所提示的问题,对地图进行相应修改,确保问题已被处理后,再次点击 【保存地图】按钮,即可保存成功。
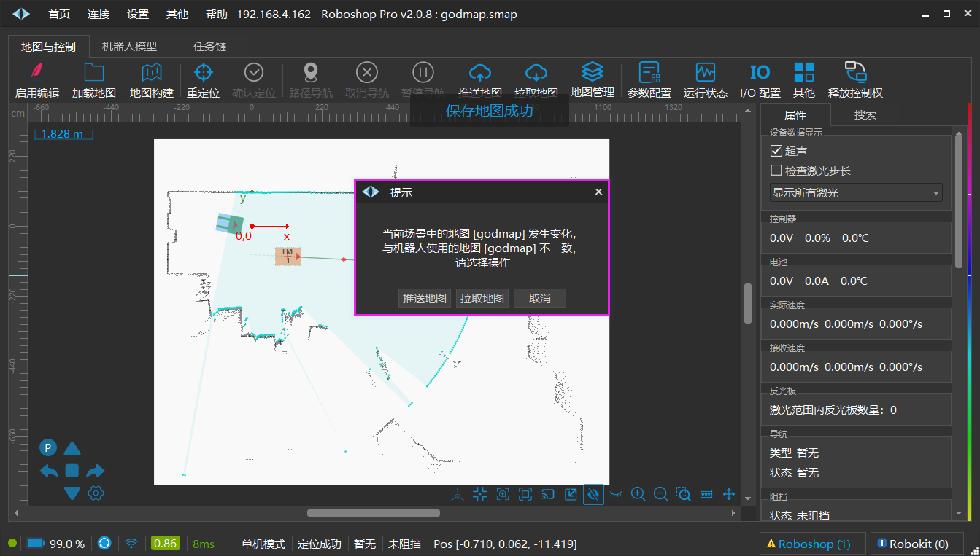
注:在 Roboshop Pro 中所修改的地图是存放在本地(计算机的 Roboshop Pro )目录中,而非直接更改的机器人所载入的地图。故在退出编辑之后,会弹出地图数据不一致的提示框,请根据实际需求选择【推送地图】、【拉取地图】、【取消】。
(转载)

