
项目背景
对绝大多数制造企业而言,生产过程中往往需要将原料从仓库运输至产线,经过多道工序加工之后,再将成品从产线运回仓库。而企业仓库与产线之间、产线与产线之间的物流运输,还主要依靠人力或人力叉车解决。
这种人力运输存在三方面的弊端。一是随着我国人口红利流失与劳动力成本不断攀升,企业用人成本增加;二是人力运输效率低下,并且不利于企业数字化发展;三是人力运输不仅出错率高,而且存在较大的安全隐患。
客户课题
该客户是一家全球领先的汽车零部件制造商,在汽车排气、内饰、座椅、吸音等模块均处于世界前列。在华东地区的某分公司,由于车间面积巨大,生产零部件的区域较为分散,成品加工完成后需要集中入库,频繁的物流运转耗费大量人力,并且效率低下,急需提升车间自动化水平。
解决方案
根据现场情况,仙知机器人协助集成商实施了该项目,通过基于SRC的潜伏顶升移动机器人及可视化操作软件Roboshop、多机调度系统RoboRoute、可视化管理系统RoboGlue等在内的整套解决方案,助力该企业实现了仓库与产线之间的物流自动化。

具体实施方案
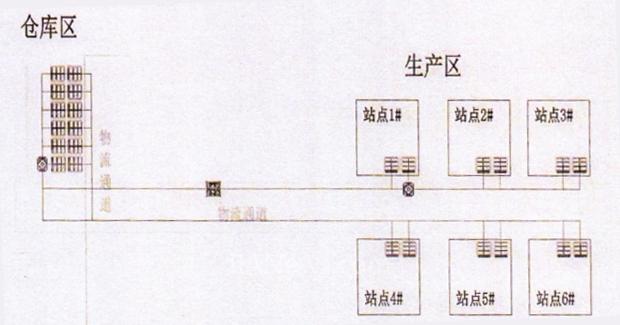
车间布局示意图
用户现场共有6条生产线和8个库位,每条生产线都各有一个上料点和一个下料点。通过可视化管理系统RoboGlue对接用户的MES系统,当有订单需求时,RoboGlue会对库位进行判断,然后根据判断结果将订单需求下发给多机调度系统 RoboRoute;调度系统对基于SRC的潜伏顶升移动机器人进行最优任务分配和最优路径规划,最终完成产线与库位之间的物料运输;当其中有机器人电量较低时,不影响正常工作的情况下,调度系统便会调度该机器人到指定的充电桩位置进行充电,从而保证车间物流永不间断。
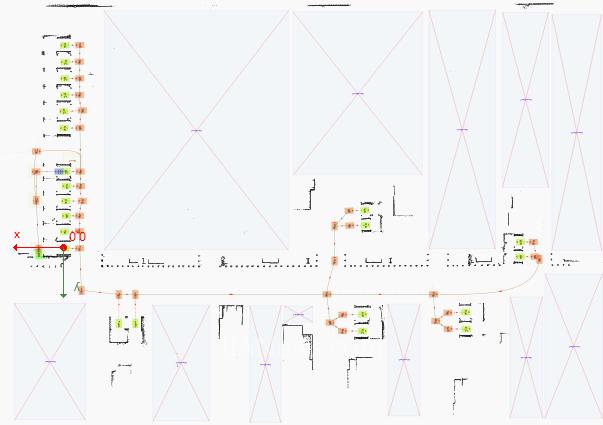
Roboshop实施图
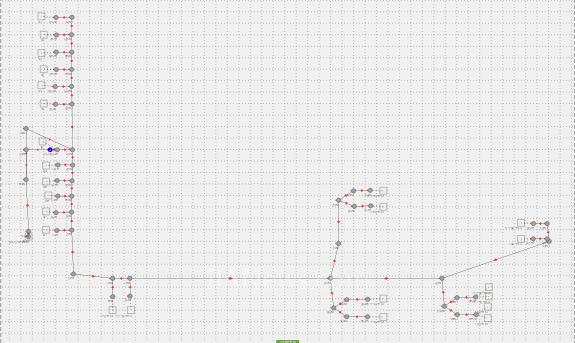
RoboRoute实施图
实施难点与对策
难点:
(1)车间面积巨大,现场环境变化多,激光传感器可参照的点位少,机器人定位容易丢失;
(2)用户没有库位管理系统,当MES系统下发业务订单时,不能对库位情况进行判断。
对策:
(1)通过可视化操作软件Roboshop进行地图构建时,减少对变化较大的点位参照;并对移动机器人运行路线区域进行限制使用,避免其他料架与货物在机器人运行通道堆积摆放。
(2)通过仙知自主研发的可视化管理系统RoboGlue对库位实时监控,保证运输顺畅进行。
给客户带来的价值
(1)通过仙知机器人智能物流解决方案灵活解决了客户现场搬运需求,实现物流自动化的同时节约了大量劳动力,降低了企业生产成本;
(2)利用仙知可视化管理系统RoboGlue解决了用户库位管理的问题,大大提升了车间数字化与智能化水平。
仙知优势
激光SLAM导航
仙知机器人激光SLAM导航,无需在地面铺设磁条或二维码等定位设施,施工难度小,机器人灵活性强,可根据现场需求灵活变更站点、路线,适合企业进行柔性生产。
可视化管理系统RoboGlue
仙知自主研发的可视化管理系统RoboGlue,作为物流信息中心和业务枢纽,能够实时监控整场物流信息与库位情况,并提供机器人运动实时图表,满足人性化交互需求。
(转载)

