
一. 应用背景
传统点胶机 又称涂胶机、滴胶机、打胶机、灌胶机。是专门对流体进行控制,并将流体点滴、涂覆于产品表面或产品内部的自动化机器。但通常点胶以接触式为主,易产生拉尖、胶量不均、刮伤元器件等问题,适合稍粗、厚的物体点胶。点胶轨迹多采用教导盒加人眼示教方式,编程复杂,精度不高,无法满足要求越来越精准、效率越来越高的应用场合。
而全自动化高速点胶机利用无接触式点胶技术,对流体进行精确控制,高速且准确地喷射于预先设定好的位置,借由胶点的疏密及轨迹的控制,形成点、线和各式图形,满足轻薄化、短小化产品点胶需求。
但是国内高速点胶机除少数厂家外普遍存在精度不高、打胶不够稳定或系统偶发卡顿等问题,因此国内很多厂商有志于开发高速点胶机,但往往花费大量的时间与精力,却达不到合格的速度与精度的设备,更达不到国外大厂的水平。
二. 高速点胶机常见痛点
1.胶距不准、胶直径不一致
对于喷射式胶阀,通过对胶阀的精确开关触发,控制从而精确控制胶量(重)、胶直径以及间距。而常见问题是胶点与胶点间距不准,没有做到精确触发胶阀,工件不平问题,导致胶直径一致性差。

图1:等间距点胶不准示意图
2.拐角堆胶
加减速段/转角处,机构的移动势必需要降速来完成拐角过弯的动作, 当高速的 直线运动于转角进行降速时,速度的快慢会与影响胶的间距,会有溢胶的问题产生

图2:拐角溢胶图
而常规的解决方案是采用增加空跑轨迹避开加减速段喷射点胶,以点一个等间距矩形轨迹为例,一般采用井字形点胶方法来解决拐角堆胶问题。但此方法虽然可解决问题,但以牺牲部分效率为代价。
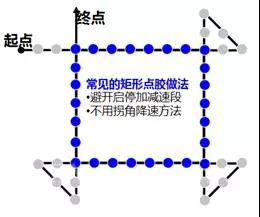
图3:传统井字型点胶做法示意图
3.机构问题导致的精度不够
执行机构精度达不到,则再调整控制系统也没有办法提升精度。机构的设计、安装水平限制了整机设备的性能,导致设备达不到高速点胶机的定义指标,设备没有竞争力。
4.点胶速度不达标
由于机构设计与控制系统设计的原因,导致加工速度达不到指标要求,使得产品设计达不到市场要求或低于客户要求。
5. 软件扩展及维护困难
由于衍生设备众多, 往往整体均用C++等高级语言开发的高速点胶机应用软件扩充功能费时费力且非常不易维护。
三. 研华方案针对痛点见招拆招
1.胶距不准、胶直径不一致拆招方案
针对喷射点胶间距、胶直径、任意轨迹离散点的精确点胶,研华SoftMotion运动控制实时核心,准确的速度控制、双轴任意高速位置比较触发功能,保证了控制的位置精准性。而方案可选配激光测高模块开启功能,保证了不平整工件点胶恒高度,同时精准控制开发时间长短,确保了胶直径的一致性。

图4:合格点胶效果图
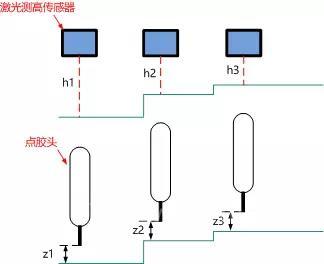
图5:激光测高Z轴自动补偿
2.拐角堆胶拆招方案
研华方案运动控制上采用拐角降速与动态PWM输出控制胶阀 ,根据轨迹速度大小实时调整PWM信号,从而实现拐角不堆胶的矩形等距高速点胶 。
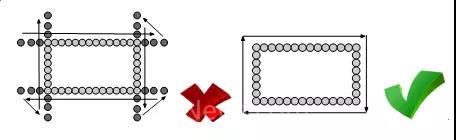
图6:直接90度拐角取代井字轨迹
3.机构问题导致的精度不够拆招方案
研华与具有十几年的点胶类行业设备设计、开发、调试经验的系统集成商合作,联合推出的此控制系统方案,不但可解决控制系统问题,还可向客户提供设计出合格的高速高精度设备的服务,甚至可提供机架,其丰富的设备调试经验,可最大程度的确保设计的高速点胶机能达到性能要求,帮助用户快速推出合格设备,把握市场商机。
4.点胶速度不达标拆招方案
研华控制系统的运动控制算法、系统集成商机构设计经验、调试经验的指导,可确保用户设备点胶在保证精度的前提下,点胶速度达到合格以上。目前典型的测试数据为:
在3mm间距点,平均点胶速度为45000点/小时,高峰为48000点/小时。
5. 软件扩展及维护困难拆招方案
研华的方案基于研华设备自动化控制器(MAS)开发,其二次快速开发平台Motion Studio改变了以往高速点胶机控制部分均用C++/C#等高级语言开发带来的一些维护不易、费时费力问题,可快速响应客户定制需求。硬件可弹性扩充,保留设备升级扩轴、扩I/O、扩视觉弹性。
四. 研华高速点胶机完整解决方案
研华提供的高速点胶机控制系统解决方案,以嵌入式无风扇MAS-4285 PC-based控制器为核心, 集运动控制、机器视觉、胶阀控制、通信于一体,搭载针对高速点胶机设备的应用软件,采用非接触喷射式定量点胶控制,实现更小的点胶直径,同时提高点胶的可靠性、一致性。方案中的点胶轨迹采用视觉精密示教、AutoCAD DXF文件导入等多种方式,配合视觉自动定位纠偏,保证了实际点胶的精确性。
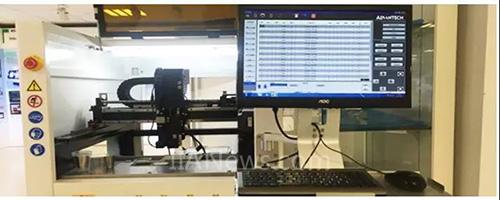
图7:高速点胶机实机图
高速点胶机动力单元主要由3轴松下伺服+2轴步进电机组成(进料和调宽轴)

图8: 研华方案架构图
五、研华解决方案软+硬优势
1. 硬件优势:一体式无风扇运动控制器

图9:点胶控制器硬件图
2. 软件优势:高速点胶机行业软件

图10:高速点胶机应用软件图
完备的行业专用软件
功能齐全:打点、线、弧、飞点、连续线、连续弧。提前开关胶,手动操作,视觉示教,校准等。
界面友好:柔和的界面颜色,直观的显示系统状态、数据、加工点和轨迹。
操作人性化:支持各功能的独立测试,支持视觉图像上示教与各轴点动。
PCB视觉定位&视觉点位示教

图11:视觉抓Mark点纠偏及视觉示教
功能预留接口,满足不同用户的不同要求

图12:激光测高补偿功能
图13:可选择配置的称重功能
实际打胶效果

六. 选择研华整体解决方案的四大理由
1. 软+硬解决方案
同时可提供二次开发,方便根据不同的需求做简单的修改
2. 一体式控制器
小体积,无风扇,抗震,固态硬盘,控制器配线比旧机器简单
3. 速度与精度
透过PWM+拐角降速与2D位置比较触发、打点/打线/飞点不卡顿,速移动下能精准开/关胶
4. 降低成本
一个控制器整合运动控制和视觉定位
七. 研华高速点胶机控制系统清单

(转载)

