
本文将介绍动作指令的编辑,主要内容为动作指令的示教和修改动作指令四要素。
一、动作指令的示教步骤:
1) 将TP 开关打到ON(开)状态;
2) 手动将机器人点动到所需位置后,按下F1【POINT】(教点资料);
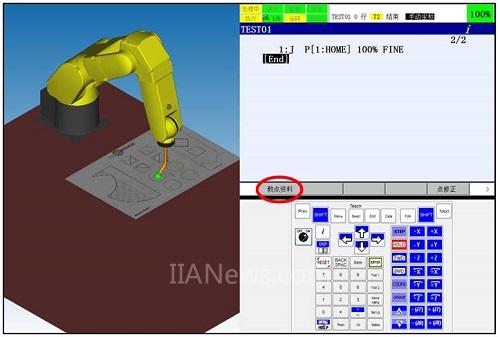
3) 显示标准动作目录画面;

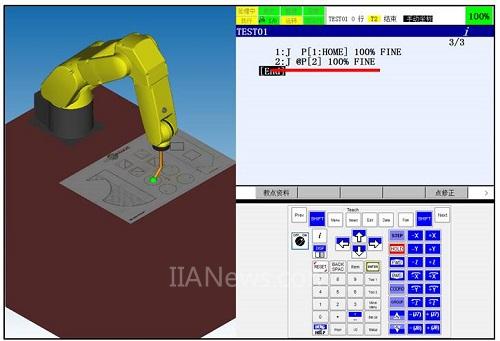
4) 选择需要的动作指令格式,按下【ENTER】(回车)确认,生成动作指令,并完成对当前机器人的位置记录。
注意:
若标准动作目录中找不到需要的动作指令格式,可按F1【ED_DEF】(标准)进行标准指令模板的设定。
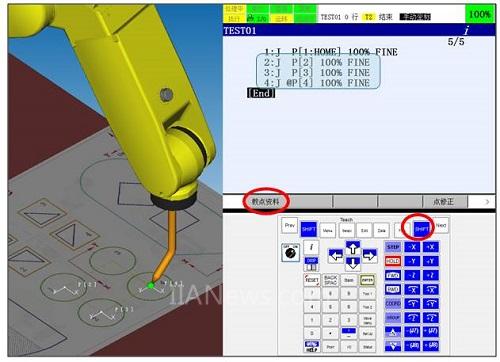
5) 当反复使用相同的标准动作指令时,只需同时按住【SHIFT】及F1【POINT】(教点资料),即可生成动作指令,并完成对当前机器人的位置记录。
二、修改动作指令四要素
1) 将光标移到需要修改的动作指令的指令要素项;

2) 按F4【CHOICE】(选择),显示指令要素的选择项一览,选择希望更改的条目,按【ENTER】(回车)确认;

(转载)

