
在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势;用户坐标系用于确定每个作业空间,另外在位置寄存器和位置补偿指令的使用上也涉及用户坐标系。
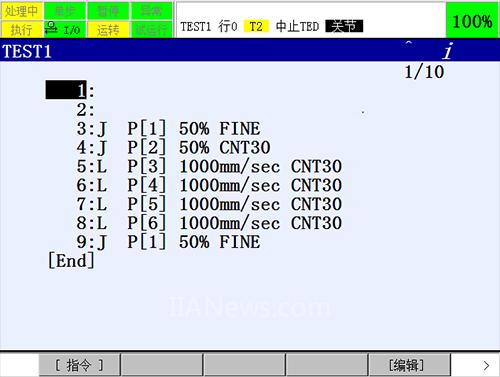
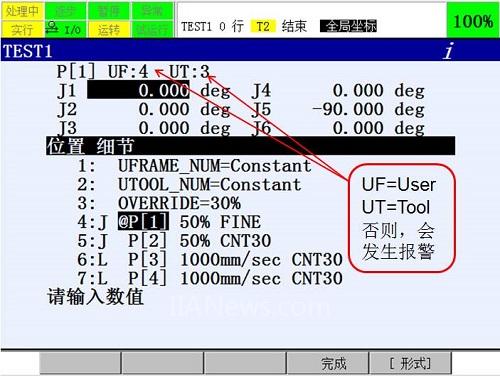
由于现场的误操作导致坐标系号码未被正确激活时,会导致程序出错,如下所示:

因此,在程序中需要添加坐标系选择指令来激活正确的坐标系号码。根据激活对象的不同,可以使用用户坐标系选择指令和工具坐标系选择指令。
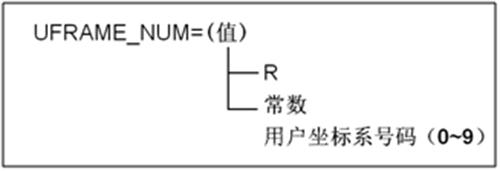
A. 用户坐标系选择指令
作用:改变当前所选的用户坐标系号码
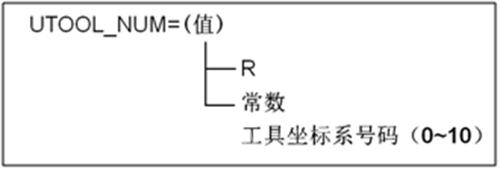
B. 工具坐标系选择指令
作用:改变当前所选的工具坐标系号码
C. 操作步骤
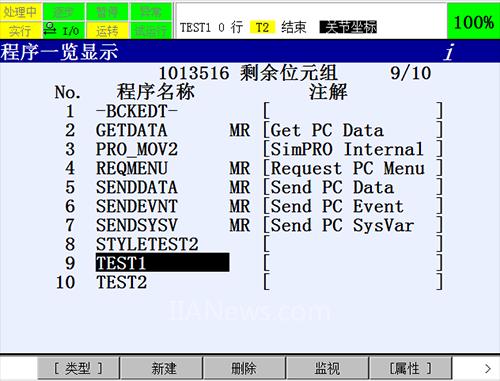
1按下 [ SELECT ](程序一览)键显示目录画面
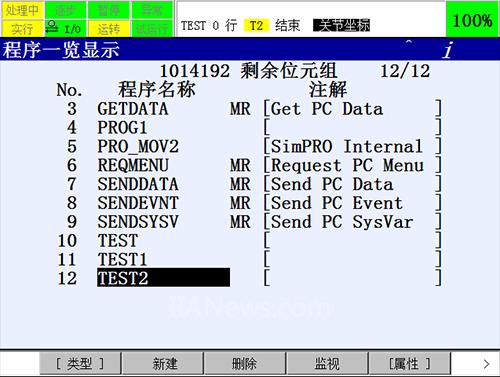
2.选择需要编辑的程序
3.移动光标至需要添加的位置处
4.选择F1 [ 指令 ],选择 [ 设定坐标/偏移 ]
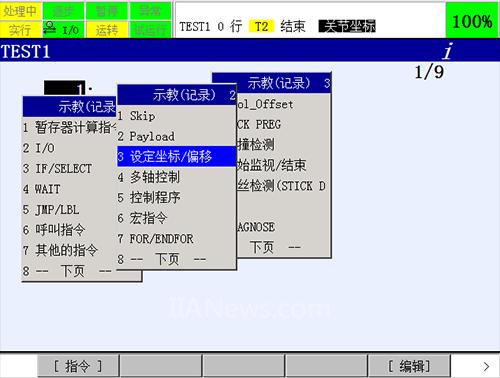
5.选择用户坐标系选择指令[ UFRAME_NUM=...]

6.选择[ 常数 ]
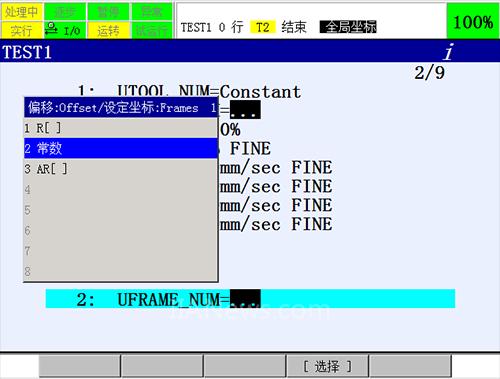
7.选择工具坐标系选择指令[ UTOOL_NUM=... ]

8.选择[ 常数 ]

9.移动光标至运动点位,选择F5[位置 ]
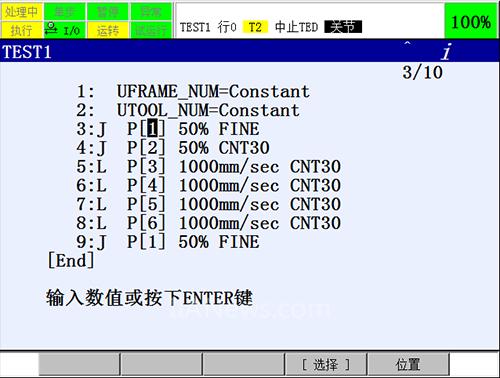
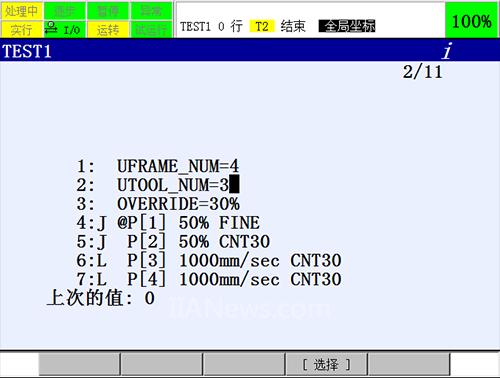
10.确认当前程序中使用的工具坐标系号和用户坐标系号
11.输入步骤10中查看的用户坐标系号和工具坐标系号
(转载)

