
冲压是机器人各种主要应用中工件出产速度最快的,一般情况下数秒钟即可压成一个工件,所以节拍对冲压的影响在各项应用中也是最大的。在冲压自动划线的仿真中,压机上模具的行程、压机工作的节拍及压机的信号设置等压机本身的因素都会影响到最终整条生产线的节拍。如何在ROBOGUIDE中创建压机并对压机的运动及信号进行设置是冲压自动化线仿真的关键因素。本文将对ROBOGUIDE该功能进行详细介绍。
一、压机的创建
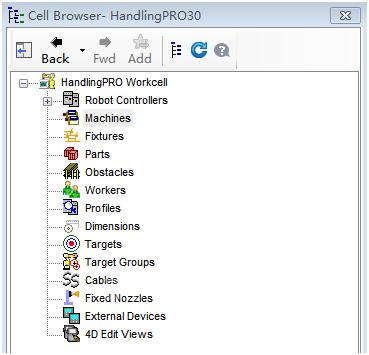
在ROBOGUIDE中导入外部的实体数模,可以添加在Machines、Fixtures、Parts、Obstacles等不同目录中,如下图所示。需要注意的是,在创建压机的过程中,压机应添加在Machines栏中,因为只有在machine上可以再添加Link,而且添加在machine上的link在设置之后是可以在程序运行时一起运动的。利用这一特性我们可以实现压机下模具与上模具之间的相对运动。类似的如滑台、转台、导轨等有多工位或者需要运动的设备都须添加在这个目录中。
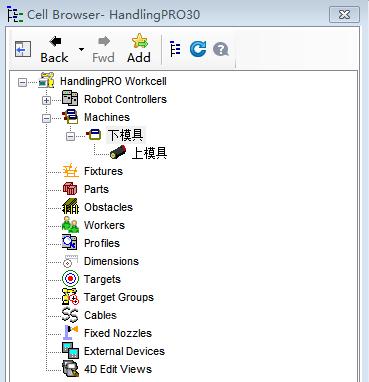
在将数模导入ROBOGUIDE前,需要使用3D制图软件将压机数模拆分为上模具和下模具(包括压机本体)两部分并使用ROBOGUIDE将数模转换为IGS格式。准备完成后,打开ROBOGUIDE,右键点击目录树上的Obstacles,将鼠标移动至Add Obstacle上就会弹出右侧添加obstacle的选项,点击CAD File,选择压机下模具数模。然后右击目录树上新生成的machine并Add Link,选择压机上模具的数模。拖动上模具数模调整与下模具的相对位置或在Link CAD选项卡中Location处输入准确相对位置。至此压机创建完成。在项目树中选中下模具后,可移动整个压机的位置。
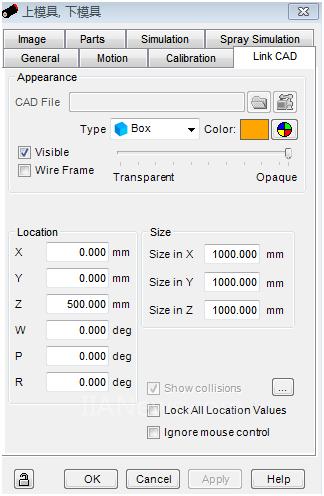
link(上模具)相对machine(下模具)位置设置
二、压机的运动设置
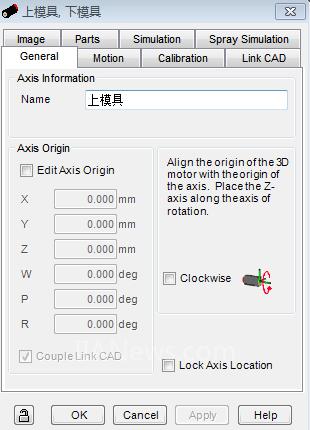
压机的运动主要通过link即上模具的设定实现。双击目录树中的上模具,对link进行设置。
在General选项卡中设置link的运动方向勾选Edit Axis Origin之后开始设置电机方向,Couple Link CAD选项启用时修改电机位置会连带改动数模的位置。从图中可以看出,直线运动时,link沿着电机Z轴正方向运动;旋转运动时,link绕电机Z轴旋转。
三、压机的信号设置
在冲压自动化生产线中,压机本身需要向外部发出信号,如到位信号、准许进入信号等。在实际生产中,压机通过点对点或总线的方式进行信号的交互,在ROBOGUIDE仿真中,可以通过link的设置,实现压机的信号控制。
双击目录树中的上模具,点击进入link的Motion选项卡,选择link的控制类型。在Motion Control Type下拉菜单中共有4种控制方式,依次分别为:伺服电机控制、设备I/O信号控制、外部电机控制和外部I/O信号控制。在压机仿真时,一般选取设备I/O信号控制这一形式。
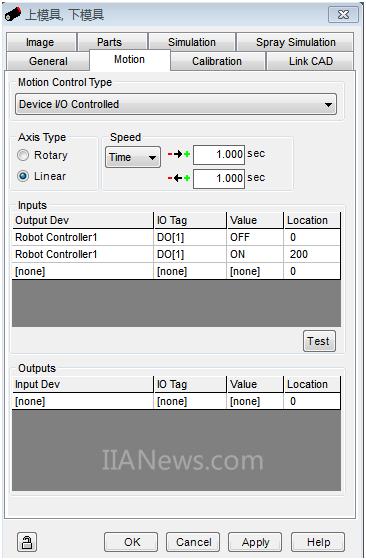
如上图所示,由于压机上模具都是竖直直线运动,在Axis Type(轴类型)处选择Linear(线性)。在Speed处选择Time,输入压机单次行程的时间,设定压机的节拍。在Inputs和Outputs栏处设定要与压机进行信号交互的机器人,在示意图中当R1机器人DO[1]信号置于ON时,压机上模具的link会向下运动200mm,实现压机运动的仿真,200mm即为仿真中压机的行程。
至此,ROBOGUIDE仿真中压机的基本设置完成。
(转载)

