
20世纪50年代出现数控机床以来,作为数控机床重要组成部分的伺服系统,随着新材料、电子电力、控制理论等相关技术的发展,经历了从步进伺服系统到直流伺服系统再到今天的交流伺服系统的过程。交流伺服技术的日益发展,交流伺服系统将逐步全面取代直流伺服系统。
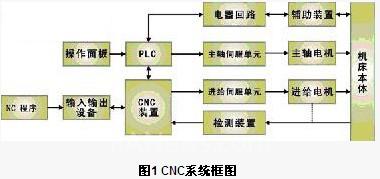
数控(Numerical Control)是数控技术的简称。它是利用数字化的信息对机床及加工过程进行控制的一种方法。数控系统是数控机床的重要部分,它随着计算机技术的发展而发展。现在的数控系统都是由计算机完成以前硬件数控所做的工作,为特别强调,有时也称为计算机数字控制系统。计算机数字控制CNC(Computer Numerical Control)系统是以微处理器技术为特征,并随着电子技术、计算机技术、数控技术、通讯技术以及精密测量技术的发展而不断发展完善的一种先进加工制造系统。CNC系统框图见图1所示,它由数控程序、输入输出设备、操作面板、CNC装备、可编程控制器(PLC)、主轴伺服系统、进给伺服系统、检测装备和一些电气辅助装置等组成。
伺服系统是以驱动装置—电机为控制对象,以控制器为核心,以电力电子功率变换装置为执行机构,在自动控制理论的指导下组成的电气传动自动控制系统,它包括伺服驱动器和伺服电机。数控机床伺服系统的作用在于接受来自数控装置的指令信号,驱动机床移动部件跟随指令脉冲运动,并保证动作的快速和准确,这就要求高质量的速度和位置伺服。数控机床的精度和速度等技术指标往往主要取决于伺服系统。
数控机床的伺服系统发展与分类
数控机床的伺服系统应满足以下基本要求:
精度高
数控机床不可能像传统机床那样用手动操作来调整和补偿各种误差,因此它要求很高的定位精度和重复定位精度。
快速响应特性好
快速响应是伺服系统动态品质的标志之一。它要求伺服系统跟随指令信号不仅跟随误差小,而且响应要快,稳定性要好。在系统给定输入后,能在短暂的调节之后达到新的平衡或是受到外界干扰作用下能迅速恢复原来的平衡状态。
调速范围大
由于工件材料、刀具以及加工要求不同,要保证数控机床在任何情况下都能得到最佳的切削条件,伺服系统就必须有足够的调速范围,既能满足高速加工要求,又能满足低速进给要求。调速范围一般大于1:10000。而且在低速切削时,还要求有较大稳定的转矩输出。
系统可靠性要好
数控机床的使用率要求很高,常常是24小时连续工作不能停机,因而要求工作可靠。
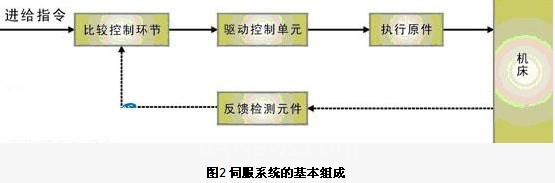
数控机床伺服系统的基本组成如图2 所示。数控机床的伺服系统按有无反馈检测元件分为开环控制系统和闭环控制系统。驱动控制单元是将进给指令转化为执行元件所需要的信号,执行元件将该信号转为机械位移。开环控制系统没有反馈检测元件和比较控制环节,这些是闭环控制系统必须的部分。
伺服系统按用途和功能分为进给驱动系统和主轴驱动系统。按有无反馈检测元件分为开环控制系统和闭环控制系统。按执行元件的不同,分为步进伺服系统、直流伺服系统和交流伺服系统。
步进伺服系统
在20世纪60年代以前,步进伺服系统是以步进电机驱动的液压伺服电动机或是以功率步进电机直接驱动为特征,伺服系统采用开环控制。
步进伺服系统接受脉冲信号,它的转速和转过的角度取决于指令脉冲的频率或个数。由于没有检测和反馈环节,步进电机的精度取决于步距角的精度,齿轮传动间隙等,所以它的精度较低。而且步进电机在低频时易出现振动现象,它的输出力矩随转速升高而下降。又由于步进伺服系统为开环控制,步进电机在启动频率过高或负载过大时易出现“丢步”或“堵转”现象,停止时转速过高容易出现过冲的现象。另外步进电机从静止加速到工作转速需要的时间也较长,速度响应较慢。但是由于其结构简单,易于调整,工作可靠,价格较低的特点,在许多要求不高的场合还是可以应用的。
直流伺服系统
60~70年代后,数控系统大多采用直流伺服系统。直流伺服电机具有良好的宽调速性能。输出转矩大,过载能力强,伺服系统也由开环控制发展为闭环控制,因而在工业及相关领域获得了更加广泛的运用。但是,随着现代工业的快速发展,其相应设备如精密数控机床、工业机器人等对电伺服系统提出越来越高的要求,尤其是精度、可靠性等性能。而传统直流电动机采用的是机械式换向器,在应用过程中面临很多问题,如电刷和换向器易磨损,维护工作量大,成本高;换向器换向时会产生火花,使电机的最高转速及应用环境受到限制;直流电机结构复杂、成本高、对其他设备易产生干扰。
这些问题的存在,限制了直流伺服系统在高精度、高性能要求伺服驱动场合的应用。
交流伺服系统
针对直流电动机的缺点,人们一直在努力寻求以交流伺服电动机取代具有机械换向器和电刷的直流伺服电动机的方法,以满足各种应用领域,尤其是高精度、高性能伺服驱动领域的需要。但是由于交流电机具有强耦合,非线性的特性,控制非常复杂,所以高性能运用一直受到局限。自80年代以来,随着电子电力等各项技术的发展,特别是现代控制理论的发展,在矢量控制算法方面的突破,原来一直困扰着交流电动机的问题得以解决,交流伺服发展地越来越快。
交流伺服系统的特点
交流伺服系统除了具有稳定性好、快速性好、精度高的特点外,与直流伺服电机系统相比有一系列优点:
交流电机不存在换向器圆周调速限制,也不存在电枢元件中电抗电势数值限制,其转速限制可以设计得比相同功率的直流电机高。
调速范围宽,目前大多数的交流伺服电机的变速比可以达到1:5000,高性能的伺服电机的变速比已达1:10000以上。满足数控机床传动调速范围宽、静差率小的要求。
矩频特性好,交流电机为恒力矩输出,即在其额定转速以内输出额定转矩,在额定转速以上为恒功率输出。并且具有转矩过载能力,可克服惯性负载在启动瞬间的惯性力矩。满足机床伺服系统输出转矩大、动态相应好、定位精度高的要求。
国内交流伺服的研究现状
交流伺服系统包括基于异步电动机的交流伺服系统和基于同步电动机的交流伺服系统。目前机床主要采用的是永磁同步交流伺服系统。在交流伺服研究领域,日本、美国和欧洲的研究一直走在世界前列。日本的安川公司在20世纪80年代中期研制成功世界上第一台交流伺服驱动器。随后FANUC、三菱、松下等公司先后推出各自的交流伺服系统,国外的这些产品大多是基于异步电动机的。国内在基于异步电机交流伺服系统的研究比较晚,到目前为止还没有产品问世。国内很多学者把研究的重点放在永磁同步电机伺服系统上。我国的华中科技大学、北京机床研究所、西安微电动机研究所、中科院沈阳自动化研究所、兰州电动机厂等单位开始研究并推出交流伺服系统。其中,由广州数控公司生产的DA98全数字式交流伺服驱动装置在我国的高精度数控伺服驱动行业已经打开局面,打破了外国公司垄断的格局,开创了民族品牌新纪元。
交流伺服的信号和数控系统接口有三种模式,也是它经历的三个阶段。以国内来说,广州数控的DA98属于第一代也是划时代的一种伺服驱动器,它是国内第一台全数字式交流伺服驱动装置,它接受方向命令脉冲。第二代是以埃斯顿为代表的EDB系列,它不仅能够接受脉冲命令信号,还能接受速度控制或是转矩控制的模拟量的输入。第三代是网络化交流伺服系统。网络化伺服系统是工业现场总线技术和全数字化交流伺服的有机结合,全数字化交流伺服技术可以使用户根据负载状况调整参数,也省去了一些模拟回路所产生的漂移等不稳定因素。采用基于现场总线的网络控制技术,将微处理器和现场总线接口置入全数字型交流电机伺服驱动器,形成智能型独立的全数字伺服控制单元,将其直接连接到工业现场总线上,就形成了新型的基于现场总线的网络控制系统。减少了硬件数量和连线,各智能单元结构上独立自主,可与外界以及相互间实现数据共享,而且可以加挂其它现场控制设备,易于扩展。到目前为止网络化交流伺服器在国内还没有成熟产品。北京航空航天大学机器人研究所开发设计了一种基于DSP+FPGA+ASIPM的网络化交流伺服控制系统,原理样机已在三维雕刻机上得到了初步的验证。
目前的伺服器驱动器内部大多采用高速DSP处理器,推进了各种先进的运动控制算法在新型驱动器上的使用。在硬件结构上各大伺服系统供应商大多采用DSP+CPLD(FPGA)结构,由于DSP和CPLD(FPGA)的可重复编程性,可以实现交流伺服系统的模块化可重构。只要为系统配置相应不同的软件(包括控制算法)就可以控制和驱动异步电机、永磁同步伺服电机、无刷直流电机,而通过对FPGA的重新配置还可以驱动直流电机和三相感应式高压步进电机。这就为数控机床的升级以及革新留下了很多的空间。
交流伺服的发展趋势
随着生产力的不断发展,交流伺服系统向着集成化、智能化和网络化的方向发展。
集成化
使用单一、多功能的控制单元,通过软件的设置实现位置控制和速度控制功能。可以使用本身配置的反馈单元构成半闭环或是通过外部接口构成高精度的全闭环控制系统。
智能化
伺服器控制模式的智能化,如在内部预先编程实现某种运动轨迹,控制本站点周边的IO口,内带主从跟随模式调整,电子凸轮等。
网络化
伺服器间实现网络化分布式控制。伺服器实现模块化的可重构,节省成本。
结束语
现代数控机床是朝着精密化和高速化方向发展。作为数控机床主要组成部分的伺服系统,越来越多的选择停留在交流伺服上面,它具有其他几种伺服系统无可比拟的优势。随着交流伺服技术的发展,交流伺服系统将逐渐地全面取代直流伺服系统。
(转载)

