
|
摘要:本文主要介绍台达AB系列伺服在单晶硅炉上使用方案的具体实施,晶体硅炉的简单加工工艺介绍,以及台达AB系列伺服的调试方法和调试流程; 关键词:台达AB系列伺服;单晶硅炉;加工工艺; 一、前言 随着世界能源供应的日趋紧张,可再生能源光伏产品发展迅猛,据行业统计2005年全国太阳能电池产能为300MW,到 2007年已发展到1000MW,到2010年我国太阳能电池/组件产能将达到5000MW以上,显示出对单晶和多晶硅有很大的市场需求,比原来的市场预期提前了10年以上,也预示出单晶硅炉的市场需求将成倍增长。单晶硅炉是半导体材料直拉法晶体专用设备,其硅单晶棒料经切割等后续工艺处理成芯片被制作为二极管.太阳能电池.集成电路等半导体材料的主要器件。近几年来由于国际能源危机及地球环境改善带来对新能源,可再生能源的巨大需求,光伏产业出现前所未有的增长,半导体硅材料的生产又进入新的发展期,因此大力加速发展可再生能源.硅光伏产业及共基础材料---高纯半导体硅(单晶.多芯片)材料已成为当务之急,而硅材料的生长离不开单晶硅炉和多晶硅炉的设备支持。 二、单晶硅炉的工艺流程简介、技术需求及方案的分析 2-1、单晶硅炉的工艺流程简介 单晶硅炉炉的组成组件可分成四部分
单晶硅炉 2-2、技术需求和方案分析 单晶硅炉上面共需要四个轴驱动,其中2个使用的是伺服控制系统,另外2个使用的是直流驱动装置实现;该设备根据工艺需要,设备分为炉架、主炉室、副室、提拉旋转机构,下随动机构及液压提升机构、真空及气路系统、水冷系统、光学测量系统、电加热和运动控制系统及计算机控制系统等诸多机构。通过系统优化,实现高科技产品的集成。其次设备采用了许多较新的机构。如上提拉旋转机构,通过花键轴配绕丝轮结合电刷环,在很小的体积上实现了稳定提拉和旋转,满足工艺需求且降低了设备高度,再有下随动机构设备采用精密滚珠丝杠配合坩埚的磁流体密封,运动保持部件置于真空室外,实现精密运动与真空密封的完美结合,使用稳定可靠,还有液压提升机构对副室翻板阀的保持采用无自锁,炉内有漏硅等压力骤增的紧急情况可以实现自动泄压提高了设备的安全可靠性等等。在电器控制上设备采用可编程操作,代替了传统的逻辑编程继电器。电器控制系统由国产机大多采用的单片机,提升到IRCON和CCD工控自动化控制三个类型,提高了设备的自动化控制水平。 有控制方案中伺服控制系统存在如下问题:1、伺服控制器的编码器输出管角经常性的损坏;2、伺服电机的输出轴端经常出现断裂的情况;3、伺服控制器的输入输出点需要DC24V和DC12V的开关电源共计4个; 原有伺服控制系统同台达AB系列伺服控制系统的功能比较如下表:
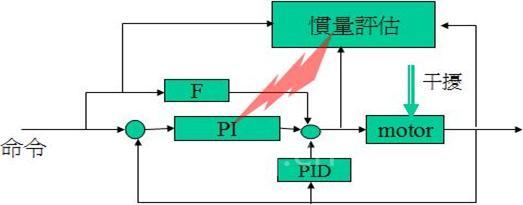
通过原日系伺服系统所存在的问题以及台达伺服同原有日系伺服的功能比较表客户最终在伺服控制系统上面选择了我们台达AB系列伺服系统的控制方案即:2套伺服控制系统选用台达AB系列伺服,型号为ASDA-0421AB; 三、台达AB系列伺服的控制理论及主要特点 3-1、台达AB系列伺服采用的是先进强健式的控制理论(PDFF)如下图
3-2、强健式控制理论的优缺点 优点: 1、在大范围负载惯量变化,系统依然保有优秀性能 2、对命令和干扰有不同的补偿控制 3、稳定性完全保证 4、阻尼刚性优良, 低速转动特性优良 5、超越量很小 缺点: 1、控制参数需由繁复数学计算而得, 使用者无法自行调整 对策:依阻尼刚性的大小, 驱动器内含十组强健控制器, 供使用者选用 四、台达AB系列伺服在单晶硅炉上使用方案的实施 4-1、单晶硅炉上位机控制系统与台达AB系列伺服的连线
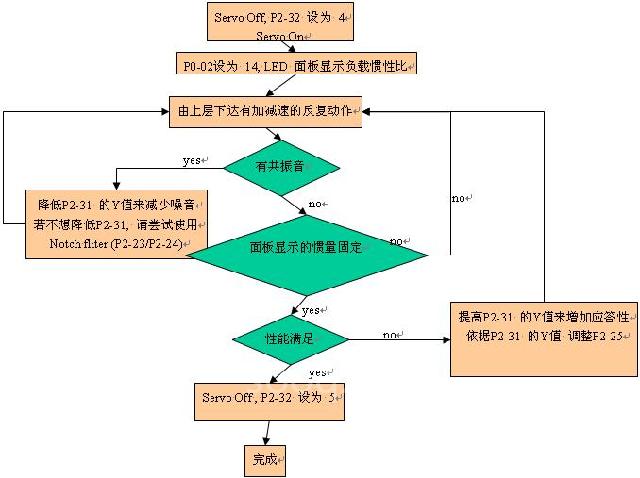
4-2、台达伺服的调试 手动调试:在整个系统的机械安装和电器的连接完毕后,首先利用上位系统或台达伺服所具有的手动控制方式,同时将所有伺服的参数P0-02设置成14,让机构的X轴和Y轴进行往复的运动,在伺服的显示屏上会显示伺服在此机构上面应用的转动惯量JL/JM,我们利用台达伺服的软件自动增益调整功能中的静态增益调整,将伺服显示的转动惯量JL/JM和我们通过调试计算出来的响应频宽B.W输入的软件中,在单晶硅炉项目中我们测试出伺服的转动惯量JL/JM、响应频宽B.W是80,计算出来我们需要的参数,把这些参数手动输入的伺服控制器中,单晶硅炉即可正常运行。 自动调试:这种调试比手动要简单了,首先也要像手动那样先将转动惯量JL/JM测试出来,把这个值输入到参数P1-37中,再把参数P2-31设置成64、P2-32设置成5,这样单晶硅炉就可以正常运行了。
4-3、ASDA伺服参数的说明 ASDA伺服在单晶硅炉系统应用中需要更改的参数说明 P0-02:14 驱动器的状态的显示;用来显示机构的转动惯量 P1-01:2 控制模式及控制命令输入源的设定 P1-37:11 伺服电机的负载惯量比;在自动模式下用来设定伺服电机的负载惯量比 P1-44:12、P1-45:10 电子齿轮比的分子、分母;使伺服电机带动的滚珠丝杠等机构运动的距离与上位机要求的距离相同 P1-46:10128 检出器输出脉冲数设定: 脉冲数设定值范围即为伺服电机一回转的输出单相脉冲数。 P2-00:125 位置控制增益;主要控制伺服位置环回路的应答性 P2-04:5526 速度控制增益;主要控制伺服速度环回路的应答性 P2-06:80 速度积分补偿;控制伺服电机、机构的固定偏差和整个机构的抖动 P2-25:3 共振抑制低通滤波;用来设定共振抑制低通滤波的时间常数 P2-26:14 外部干扰抵抗增益;用来增加对外力的抵抗能力并降低加减速的过冲现象 P2-31:64 自动及简易模式设定;在自动模式时用来设定响应的频宽 P2-32:5 增益调整方式;设定伺服的调整模式为PDFF自动模式即负载惯量比固定,伺服的响应频宽可调整 五、结束语 2007年,在全球范围内晶体硅产量中,电子级占接近55%,太阳能级占45%多。随着太阳能光伏产业的迅猛发展,太阳能电池芯片对晶体硅需求量的增长速度远高于半导体晶体硅的发展(太阳能递增速度2位数以上,半导体芯片5%左右),不久的将来太阳能晶体硅的需求量将大幅度超过电子级晶体硅用量。当前,晶体硅材料(包括多晶硅和单晶硅)是最主要的光伏材料,其市场占有率在90%以上,而且在今后相当长的一段时期也依然是太阳能电池的主流材料。在世界范围内,太阳能级晶体硅生产与供应已严重制约太阳能电池的发展,由此可以看到对应生产晶体硅的设备单晶硅炉和多晶硅炉在最近几年的市场必定是异常火爆,同时晶体硅炉设备的发展也是影响太阳能行业的重要发展方向之一; | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

(转载)

