
智能变送器的核心技术之一是现场总线技术,其中Rosemount公司于80年代中期推出的HART协议现场总线标准具有兼容4~20mA模拟信号与数字通信的性质,符合HART协议的智能变送器可以和4~20mA模拟变送器混合使用,因此比较适合目前工业界还在大量使用4~20mA模拟变送器的实际情况。经过10年的发展,HART协议已成为智能仪表事实上的工业标准[3]。世界上有70多家公司采纳了这一协议,如Foxboro、Smar、ABB、Moore和Honeywell等。世界智能变送器市场中符合HART协议的已占76%以上[4]。
目前,国内智能变送器技术尚在开发中。由于智能变送器内嵌微控制器,因此具有强大的计算功能,同时现场总线协议使其具有双向数字通信能力,这两项功能使智能变送器的设计思路与模拟变送器的设计思路相比有显著不同,以前难以想象的一些复杂的数字运算和强大的人机界面在开发智能变送器时变成可能,数字化技术大大提高了变送器的技术性能和使用的方便性。本文介绍的正是这样一种符合HART协议的智能变送器——霍尔液位变送器的设计。
1 变送器传感环节工作原理
霍尔液位变送器以线性霍尔元件作为敏感元件。线性霍尔元件有两个输入端和两个输出端,有恒压供电和恒流供电两种方式,其输出与输入电流强度、磁场强度成正比。一般线性霍尔元件采用恒流供电方式可以得到比使用恒压供电方式更好的温度性能。
霍尔液位变送器传感环节工作原理见图1。图中,H1和H2是固定于仪表盒中上下两侧的两个霍尔元件,马蹄形的一对磁棒可以绕仪表盒中一点上下旋转。变送器工作时,磁钢根据液位的变化上下移动,通过磁引力带动磁棒上下旋转,从而使切割两个霍尔元件的磁力线密度产生变化。由于霍尔元件的输出与其所处位置的磁场强度成正比,因此,由霍尔元件的输出可反映磁棒旋转的角度,进而反映液位。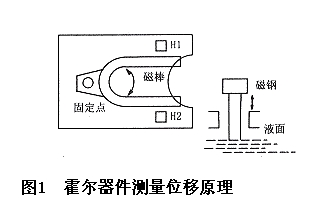
这种测量液位方法的精度受两个因素制约:(1)霍尔元件的温度特性。线性霍尔元件的温度系数最大为0.06%/℃,因此,若要保证变送器测量液位的精度,必须对霍尔元件的输出进行温度补偿。(2)整个传感环节的非线性。两个霍尔元件位置处的磁场强度随液位的变化而变化的函数形式非常复杂,但在总体上是一条单调曲线,因此可以用分段线性化进行补偿。
2 HART协议简介
HART通信协议参照“ISO/OSI”的模型标准,简化并引用其中三层制定而成,即物理层、数据链路层和应用层。这里仅对物理层和应用层作简要介绍,协议的详细资料请查阅参考文献1~3。
物理层规定了HART通信的物理信号方式和传输介质。HART协议采用了Bell202标准的FSK频移键控信号,即在4~20mA的模拟信号上叠加幅度为0.5mA的正弦调制波,1200Hz代表逻辑“1”,2200Hz代表逻辑“0”。由于所叠加的正弦信号平均值为0,所以数字通信信号不会干扰4~20mA的模拟信号。
应用层规定了HART通信命令的内容,共分为3类。第1类是通用命令,第2类是普通应用命令,协议对这两类命令的含义作了详细规定,比如读制造厂号及产品型号,读主变量值及单位等命令,使符合HART协议的产品具有一定的互换性。第3类是特殊命令,这是各家公司的产品自己所特有的命令,不互相兼容,如线性化标定命令、传感头校正系数微调命令等。灵活利用智能变送器的数字通信能力可以大大提高使用变送器的自动化水准,比如本文介绍的变送器使用温度标定命令进行温度标定,非常方便。
3 变送器整体硬件结构
由于关于符合HART协议的智能变送器的硬件设计已有文章进行过详细的叙述[4],因此这里只给出硬件的总体结构(见图2)。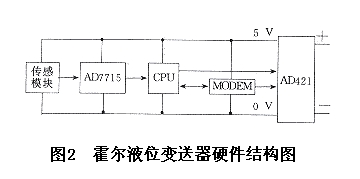
硬件分两部分:传感测量输出部分,包括传感模块、AD7715和AD421;HART协议物理层实现部分,包括AD421和MODEM。由于本变送器采用电源线和信号线复用的二线制,采用HART数字通信时要求在最苛刻的情况下,即0.5mA的正弦波电流信号叠加在4mA电流上时,智能变送器仍能正常工作和通信,因此整个智能变送器的硬件电路耗电必须在3.5mA以下。所以,两部分的硬件设计都须符合低功耗这一限制条件。
4 变送器传感测量部分的硬软件设计
如前所述,由于低功耗的限制,传感测量部分(包括两个霍尔器件、信号调理、A/D转换、基准源)的耗电不能超过1.2mA。为此,我们设计了如图3所示的电路。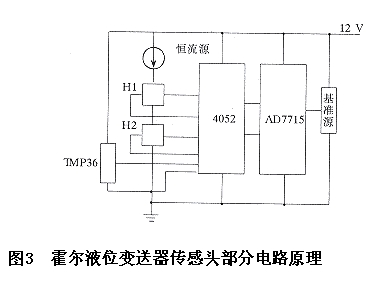
图3中,两个霍尔元件采用恒流源供电,供电电流为0.4mA,由于霍尔元件的输入电阻较小,所以两个霍尔元件串联后的压降不超过2V,因此恒流源可以正常工作。两个霍尔元件的输出电压分别接到4选1模拟开关4052的一对输入端口上。温度传感集成电路TMP36用于测量环境温度,以对霍尔元件的输出进行温度补偿,其输出也接到4052的一对输入端口上。因为两个霍尔元件在变化磁场中的输出是差动的,即当某个霍尔元件输出增大时,另一个霍尔元件输出必然减少,因此测量两个霍尔元件的差动输出可以得到两倍于只使用单个霍尔元件的灵敏度。同时,由于不同霍尔元件的温度系数接近,所以测量两个霍尔元件的差动输出还能补偿一部分霍尔元件温漂误差。
4052的输出端口接到AD7715的输入端。AD7715是耗电只有0.5mA的采用∑-Δ原理的A/D转换芯片。它内部带程控放大器,可测量满量程为10mV的输入电压,所以可以省去对霍尔元件输出电压的差动放大电路,而通过切换4052的通道,轮流对两个霍尔元件的输出电压采样,然后在软件中将两通道的采样值相减,以此实现两个霍尔元件的差动输出的测量。
从图3可以看出,这个传感头部分的硬件设计是相当简洁的。其软件设计包括如下步骤:
(1)对霍尔元件H1的输出采样,并进行温度补偿;
(2)对霍尔元件H2的输出采样,并进行温度补偿;
(3)将经过温度补偿的两个霍尔元件的输出采样值相减,并分段线性化;
(4)从步骤1开始循环,同时每隔一定时间对TMP36的输出采样。
5 霍尔元件的温度补偿方法
由于线性霍尔元件在恒流供电使用方式下温漂系数最大不超过0.06%/℃,所以必须进行温度补偿。
温度补偿一般有硬件补偿和软件补偿两种方式。使用具有和霍尔元件的温度特性相匹配的温度曲线的温敏器件(比如锰铜丝、温敏电阻等)可以对霍尔元件的温漂进行硬件方式补偿。这种补偿方式要求霍尔元件的温漂系数比较接近,同时要求事先测出霍尔元件的温度系数,然后挑选匹配的温敏器件进行补偿,因此当霍尔元件的温度系数离散性较大时不适用。在本变送器中采用了软件补偿方式,因为软件补偿方式灵活,必要时可以单独标定每一个霍尔元件的温度曲线,同时借助HART协议的数字通信接口和手持操作器,可以自动实现温度标定,使用者只需通过手持操作器发送几个专用的命令即可,充分发挥了智能变送器的优越性。
在温度补偿之前首先必须制作温度标定表。温度标定表位于EEPROM中,由两个一维表组成:(1)温度表,由在不同温度标定点下对TMP36采样得到的一系列采样值组成;(2)霍尔元件输出采样值表,由在不同温度标定点下对霍尔元件输出采样得到的一系列采样值组成。
温度标定表在温度标定时通过手持操作器控制变送器自动生成。首先让霍尔元件置于恒定磁场中,并输出较大的电压,然后用手持操作器发出进入温度标定模式命令,变送器收到此命令后,就进入温度标定模式,开始对两个HALL片的输出交替采样。当操作者等到环境温度稳定时,通过手持操作器发出确定命令,此命令带一个指出此标定点在温度标定表中位置的参数。变送器收到此命令时,将当前的TMP36输出采样值和霍尔元件的输出采样值送到温度标定表指定位置处。操作者在不改变磁场的前提下,改变环境温度,就可以标定一系列点。温度标定表中的标定点数最大可达32点,但要求温度补偿表中的温度值必须从小到大排列。当标定结束后,发出退出温度标定模式命令。变送器收到此命令时,就退出温度标定模式,并查温度标定表中与25℃最接近的两个点的坐标位置,然后通过插值求出霍尔元件在此磁场强度下25℃时的输出值V0,存于EEPROM中。
变送器在正常工作模式下,对霍尔元件的输出采样得到V,对TMP36的输出采样得到T,然后根据T值查温度表,得到表中离此值最近的两点温度值T1、T2以及在霍尔元件输出采样值表中对应的两点的值V1、V2。求出在标定时的磁场强度下霍尔元件在温度T的输出值:
V′0=(T-T1)(V2-V1)/(T2-T1)+V1
则经过温度补偿后的霍尔元件输出值V′为
V′=V×V′0/V0。
从上述可以看出,温度标定的操作者可以对每一台变送器进行温度标定,从而对整机的温度特性进行良好、精确的补偿,而且标定的大部分工作由变送器自动完成,无需人工干预。同时,为了节约生产成本和生产时间,也可以对所有的变送器使用统一的温度补偿表,温度补偿表可通过编程器写入EEPROM或通过手持操作器使用专用命令写入。
同理,变送器的线性化标定也用类似的方法用手持操作器实现。
6 结论冶金自动化
本文介绍的符合HART协议的霍尔液位变送器完全符合HART协议的规范,可与任何符合HART协议的手持操作器或控制系统互连。在设计中充分利用了智能变送器能够进行双向数字通信的优点和内嵌微控制器的强大计算功能,变送器的传感测量输出部分尽可能地使用数字手段完成温度补偿、线性化、阻尼滤波、量程迁移和模拟输出微调等功能,实现这些功能所需要的参数都可通过手持操作器方便地进行设定。一些复杂的操作如温度标定和线性化标定,使用手持操作器后变得非常简单,与手工标定相比,减少了标定的劳动强度和出错概率。该变送器性能优良,现场使用效果良好,运行稳定。
参考文献
1 Rosemount Inc HCF Document: HART-SMART Communication Protocol, FSK Physical Layer Specification. Rev:7.2.1993.
2 Rosemount Inc HCF Document:HART-SMART Communication Protocol, Data Link Layer Specification. Rev:7.0.1993.
3 斯可克,李喜刚,陆伯勤.HART智能变送器的数字通信.冶金自动化,1995,19(3):19~27
4 顾伟俊,金建祥,褚 健.基于HART协议的1151智能变送器的开发.自动化仪表,1998,19(3):5~7
(转载)

