
3月26-27日,中国人工智能和机器人领域开发者的年度盛会——中国人工智能与机器人开发者大会(CAIRDC)在上海盛大举行。26日晚,明珠奖颁奖盛典也正式拉开帷幕。由26位科学家、专家、投资机构负责人组成的评奖专家组,经过严苛选拔、公开答辩,为最终获奖的企业颁发明珠奖获奖证书与奖牌。

本届明珠奖申报单位总计71家,申报项目总计87个。经过专家组的评选,最后的获奖企业39家,获奖项目44个,申报项目获奖率为50.5%。明珠奖评选采取企业自主申报,组织公开公平答辩的方式进行。在答辩中,迦智科技CTO孙逸超针对所申报的奖项一一答辩。最终通过材料评审,问询答辩,现场评审等环节的层层考验,迦智科技的“EMMA全向柔性搬运机器人”以卓越表现,高分摘取了本届明珠奖“移动机器人产品创新奖”殊荣。


EMMA
全向柔性搬运机器人

◆面向1000kg及以上载荷,实现狭窄空间内搬运需求的全向自主导航底盘平台
◆采用激光SLAM/视觉/惯导多传感器融合定位技术,可实现±2mm精确轨迹规划与运动控制
◆基于双差分舵轮驱动,可实现前进/后退/旋转/侧移/斜行等运动方式,具备平面上的全自由度运动能力
◆支持异形尺寸物料搬运
技术突破与创新点
地面自适应悬挂底盘技术
获得国家专利授权
突破重载荷底盘驱动核心技术
◆地面平整度自适应驱动系统,确保驱动轮时刻与地面稳定接触,防止打滑,确保了高负载场景下的±2mm运动精度和可靠性
◆双差分舵轮组结构,可实现前进/后退/旋转/侧移等平面内任意方向的移动
柔性可变面积承载平台
适应不同尺寸物料与狭窄空间约束

◆可变面积承载平台,可适应不同尺寸托盘的搬运需求
◆基于机械安全销的自锁结构,保证了运输过程的平台结构可靠
超大尺寸地图构建能力
突破运行场景的尺寸限制
进一步压榨硬件与算法极限
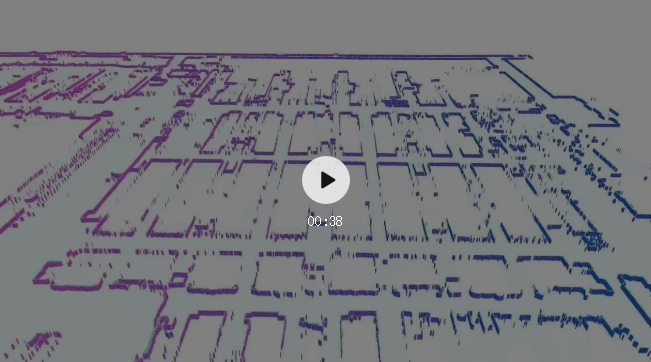
◆基于整数规划的最优地图特征选择
◆知识蒸馏的神经网络压缩方法,使地图压缩比近98%
◆实际部署场景面积超过5万平方米
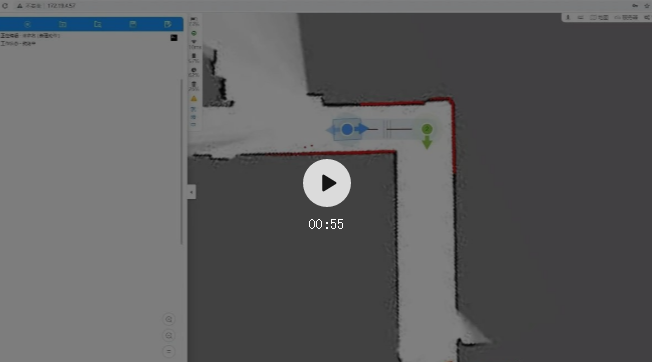
受限空间下全自由度点到点轨迹规划
适应各类场景空间约束
规划最优移动姿态
◆基于动力学与运动学模型的NLP轨迹规划
◆基于空间约束特征的最优姿态规划
◆实现空间约束条件下的±2mm闭环轨迹控制精度
可视化动作示教与编辑平台
降低产品部署应用门槛
支持快速部署与维护
◆基于Scratch的可视化行为编程界面
◆实时运行状态数据反馈
◆便捷操作易学易用的人机交互方式
与企业信息平台深度打通的多机调度系统
打破制造业信息孤岛
打造智慧工厂互联平台
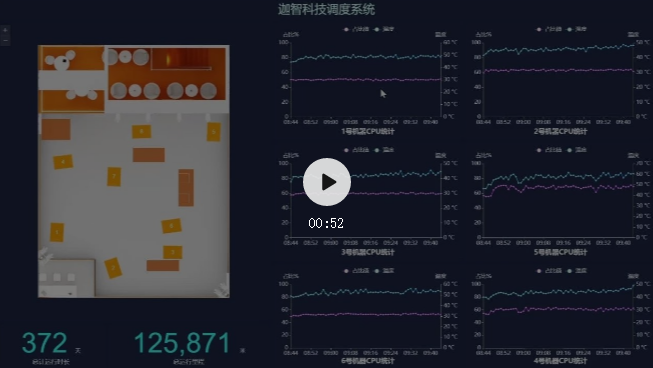
◆与企业MES/WMS系统联动,实现全厂物流信息流转
◆支持跨工艺段、跨楼层作业,实现多机器人任务协同与排程
产品应用实例及前景
产品应用
家族平台化支撑孵化多款全向重载搬运机器人产品


产品应用前景

(转载)

