
70岁
AGV老祖宗
第一辆AGV在上世纪50年代由伊利诺伊州诺斯布鲁克的Barrett电子公司推向市场的。当时,人们在底板上预埋了电线,拖车AGV可以跟随者地板里的电线往前行进。而在此之前,小车都是由一根链条拉着小车沿着固定的轨道行走的。这种AGV最早被部署在伊利诺伊州芝加哥的威利斯大厦(前身为西尔斯大厦),主要负责在其整个办公室内传递邮包。

58岁
自动化立体库老祖宗
在上世纪60年代,第一座真正意义上的由计算机控制的自动化立体仓库在美国被研发出来。自此各种生产企业开始在自己的仓储环节陆续引入自动化立体库以提升供应链的管理水平。
在1962年,德国的Demag公司(德马泰克的前身),为位于德国居特斯洛的贝拉斯曼图书俱乐部的仓库安装了一套最早期的立体仓库。

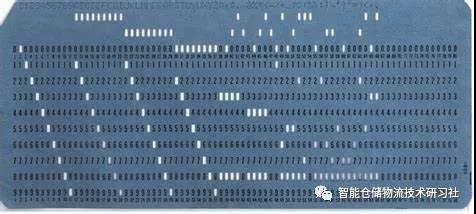
当时是在立柱侧面安装有控制柜,由人工操作可以实现半自动的存储作业。当时的控制系统还是基于打孔卡的骨灰级的计算机系统,相信见过这种东西的人可不多。
47岁
柔性AGV老祖宗
在1973年以前,传统的汽车装配线都是以输送机为中心的,用输送机意味着生产线从头到尾的生产是刚性的,一旦某段输送机发生故障,后续的生产线就得停机。当时瑞典卡尔玛的沃尔沃汽车装配厂的工程师开发了一种非同步装配设备,以替代传统的以输送机为中心的装配线。这种非同步装配设备就是柔性的AGV系统,自此,汽车的生产可以伴随着柔性的AGV灵活的移动到任何环节的工位上。最终,此项目中安装了280台由计算机控制的AGV。沃尔沃后来向其他汽车公司推销了他们的这种柔性AGV。

45岁
可接驳AGV老祖宗
可接驳(单位装载搬运车)AGV用于将单位装载从一个工位移动到另一个工位,并通过滚轴自动装载和卸载货盘。它们通常具有比其他类型的AGV更低的有效负载能力,并用于承载比传统AGV更小的负载。
1975年,第一套可接驳的AGV被应用到具体项目中,它能够完成许多任务,比如搬运物料到不同的站台处并释放掉物料,同时可以与信息系统链接。

31岁
激光导引AGV老祖宗
AGV随着技术的进步不断进化,工程师为了消灭AGV在运行前必须提前预埋电线或者磁条,而做出了多方面的努力。在1989年,基于激光导引的AGV小车被发明出来,通常被称为LGV,LGV可以无需安装地面任何线缆就可以实现AGV小车的自动导航和行走。下图是1991年在新加坡部署的10台激光导引AGV的照片,此项目中的AGV是基于NDC导航和驱动平台实现的。

27岁
穿梭板的爷爷的爷爷
随着土地资源的紧缺和成本上涨,仓库希望能在有限的空间能尽量存储更多的物料。有人发明了一种半自动的密集存储的技术,也就是现在应用非常广泛的一种托盘密集存储系统:托盘穿梭板(穿梭车)。穿梭板搭载锂电池,可以在密集货架里进行先入先出或者先入后出的存储作业。
全球首个托盘穿梭板为瑞典的EAB公司在1993年发布的。当时与瑞典BT公司(后被丰田收购)和德国公司Papstart合作推出。当时命名为“Radio Shuttle”。

19岁
多穿的老祖宗
随着现代商业社会的发展,订单越来越碎片化,拆零拣选的需求越来越旺盛。为了满足拆零拣选的货到人的周转箱的快速周转的需求,急需一套高吞吐率的料箱自动化存储系统。由此,多穿系统横空出世。最早的多穿系统Multishuttle是由在德国多特蒙德的弗劳恩霍夫研究所发明的,并在德马泰克进行了原型开发。
1970年代,在丹麦有一家叫“FKI Logistex”的公司就已经注册了相关的专利。在2001年,由德国佛劳恩霍夫研究所提出产品理念。之后由当时Siemens-Dematic公司开发原型机。大约同期开发的还有奥地利公司Knapp和中国的南京理工大学现代物流研究所(后成果转化为华章),时间约为2003~2004年。
下图是早期的德马泰克的多穿系统的照片。

18岁
Kiva机器人老祖宗
Kiva在电商中大规模应用的故事想必大家都了解,最早的Kiva机器人大规模使用是在被亚马逊收购之后(2012年),当时斥资斥资7.75亿。
而Kiva最早的原身叫Distrobot ,早在2002年,相关设计专利就在美国被注册好了。


文章来源:江苏华章物流科技股份有限公司 微信公众号
(转载)




