
抖空竹在中国有悠久的历史
它初看起来像是在玩一个大型悠悠球
其实它可是一件难度系数较高的技术
当抖动空竹做出花样技巧时
人的上肢肩关节、肘关节、腕关节
下肢胯关节、膝关节、踝关节
加之颈椎、腰椎都需要巧妙配合
最近,抖空竹还火到了机器人领域!

抖空竹机器人
这个抖空竹如行云流水般的家伙
就是欧姆龙集团下SINIC X公司
开发的空竹机器人
同时,它还能进行人机协作
实现AI与传统的巧妙碰撞!

抖空竹机器人
01
“化繁为简”——空竹模型诞生!
抖空竹的核心在于绳子,要模拟绳子的运动轨迹并不容易,原因在于空竹和绳子之间的相互作用是十分灵活的。
除此以外,影响绳子摩擦力的因素还有很多,因此,在实际操作时往往难以测量或具象化这些因素。
欧姆龙研发的空竹模型(Diabolo Model)“化繁为简”,简化了原本抖空竹的复杂动作,用一个椭圆来表示绳子的轨迹,力与运动的关系也得以更方便地计算。
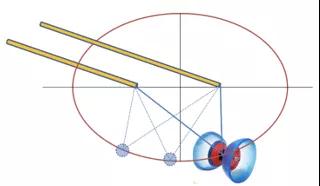
椭圆空竹模型
为确保模型的准确性,欧家研究人员通过记录人们花式抖空竹的过程,形成了一个数据集,并将这一数据集和模型进行对比。
我们惊讶又欣喜地发现,在精度与物理一致性上,模型的表现结果都超过了预测水平。
研究人员记录人们抖空竹过程的数据
02
机器人“花式”玩空竹的秘诀
在空竹模型的研发过程中,研究人员描述了一种基于最优控制的方法「基于模型的预测控制」(Model-based Predictive Control,MPC)。
这一方法能在输入空竹的速度和位置数据后,通过优化其中一根小棒的运动轨迹,预测两根小棒顶端的运动轨迹,来生成机器人抖空竹的轨迹。如此一来,机器人就能变身杂耍达人,花式玩转空竹~

MPC方法的具体过程
最后,研究人员在真实的机器人系统上进行测试,并成功解锁了人机共抖空竹的炫技场景。
03
从抖空竹,看未来人机共融
由于抖空竹主要是依靠惯性进行操作,如果用真正的机器臂来训练这样的高加速度任务,不仅成本会很高,而且操作起来存在一定的危险性。
而对于机器人来说,抖空竹其实是一个挑战递增、激励不断的绝佳学习过程。

欧姆龙第六代FORPHEUS乒乓球机器人
OMRON SINIC X公司这次的研发,目的在于推进机器人精细控制和人机协作,这也是欧姆龙继FORPHEUS乒乓球机器人后的又一力作,是欧姆龙深耕机器人领域,不断探索的成果。
未来
欧家的空竹机器人将会持续升级
继续挑战更多复杂动作
我们还将发布该模型作为独立模块
和Gazebo插件以供学习
不断刷新人机共融的新境界
(转载)

