
协作机器人,即指被设计成可以在协作区域内与人直接进行交互的机器人。这就意味着,与传统工业机器人相比,协作机器人不再需要安全围栏,安全性高、简单易用、部署灵活,可在大规模、标准化与柔性生产之间灵活切换,这也正是协作机器人的优势与价值所在。

近年来,不少制造业企业开始引入协作机器人,但理想很丰满,现实却有些骨感。协作机器人由于部署在与人共同工作的协作空间(Collaborative Workspace)内,因此衡量产品的第一指标就是安全性。目前协作机器人都通过什么方法来保障安全?本文通过对市面上三种主要技术路线的分析,来评估其安全的程度与付出的代价。

协作空间示意图
在早期版本的 ISO 10218-1 中明确指出,在可能与人发生安全事故的场景中,机器人的末端TCP速度不应超过250mm/s,而协作机器人一般自身速度可达2m/s,要想达到这个标准,大部分协作机器人产品选择了牺牲效率,即把工作效率降到20%以下,这对于生产企业来说根本无法接受,成为制约其更大规模应用的重要原因之一。

ISO 10218-1-2011

机器人有效质量vs不同身体部位vs最大允许碰撞速度
来源:ISO/TS 15066 安全标准
协作机器人在效率与安全之间的矛盾成为了生产企业心中挥之不去的“阴影”,与采用机器人实现自动化、降本增效的初衷背道而驰。于是,作为协作机器人安全性能的补充,市面上出现了协作机器人的安全配件产品,以期弥补这一“硬伤”。
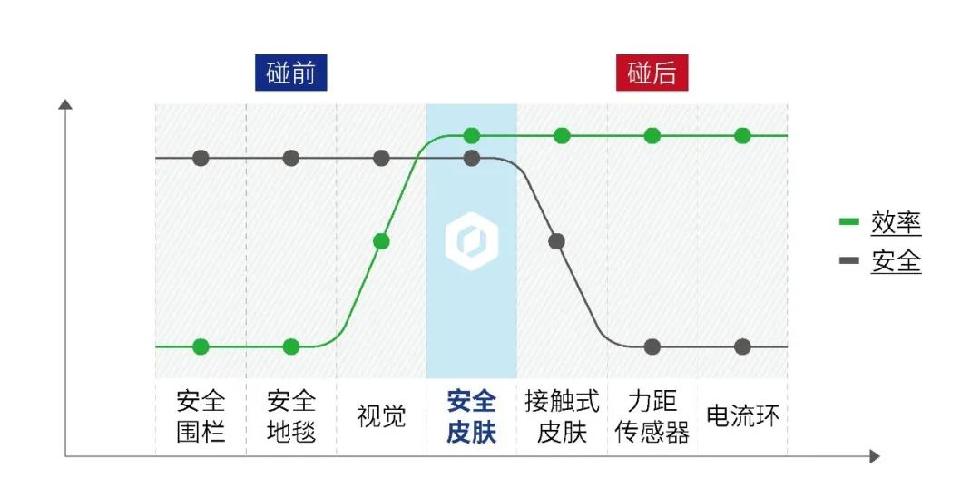
解决方法主要有两类。一类是在碰撞前感知,即在可能发生碰撞的时候让机器人降低速度,主要方式包括安全光栅、安全地毯、视觉安全系统等,在工业机器人领域应用广泛,一般是通过检测入侵机器人工作区域的信号,提前让机器人降速或停止。这种方法的好处是在没有碰撞风险的时候,可以全速运营,保障效率。

人机隔离式工作环境

人机协作式工作环境
但是,这种方式应用于人与机器协作的区域内就会引发新问题,需要应对协同工作人员频繁进入工作区域的情况。如果每次都降速或暂停,原有工作流程会经常性被迫中断,整体效率同样会大幅降低,还是牺牲了效率。
另一类是碰撞后感知,即提高碰撞后感知的响应速度,防止伤害的延续,通过包括关节力矩传感器、末端力传感器、安全底座等方式,提升协作机器人的力觉感知能力,增强机器人本身的碰撞感知灵敏度,从而更快、更准确的对碰撞作出反应,减少伤害的程度。
但是,根据动量定理,我们都知道 “覆水难收”、“开弓没有回头箭”,碰撞所产生的力的峰值发生在碰撞发生后的0.1s内。对于大多数高速运行的机器人系统,这种被动式的响应方式,无法阻止伤害的产生,很难起到降低损伤的目的,所以还是需要降低效率来保障安全。

想象中的碰撞急停

实际中的碰撞急停
效率与安全能否兼得
越疆科技推出的“安全皮肤”Dobot SafeSkin 解决了这个两难问题。
越疆科技推出的“安全皮肤”Dobot SafeSkin 解决了这个两难问题。这款产品专为协作机器人量身定制,不同于以上两种碰撞检测方案,越疆安全皮肤采用碰前预感知技术,它是一款穿戴式碰撞检测产品,可完全包裹于机械臂之上,覆盖面积大,任何一个角度的入侵都可以感知到,在保证高效生产的同时,最大化保障了人的安全,为实现人机协作提供了更实用的安全解决方案。

Dobot SafeSkin
“安全皮肤”采用越疆科技自主研发的碰前预感知技术,无需提前预警降速,在即将发生碰撞时对机器人的行为迅速做出干预,避免伤害的发生,充分满足了工业生产中对高效率与高安全性的要求。
碰前预感知技术
实测结果显示,协作机器人在中低速运动情况下,越疆的安全皮肤可完全避免碰撞发生,在高速运动情况下,碰撞损伤降低90%,符合协作安全标准。
越疆科技“安全皮肤”具备以下六大特点:
远距感知:15cm 超长感知距离,有效避免操作人员受到撞击伤害。
快速响应:10ms 内快速判断并作出响应,实现高灵敏度人机协作安全交互。屏蔽干扰:通过屏蔽技术抵抗工作现场的干扰源信号,确保机器人稳定运行环境。感应力强:感应能力不受布料、塑胶手套等遮蔽物及光源条件影响,保障安全。即装即用:操作简便,可快速完成安装,即装即用。性能保障:在使用过程中,几乎不会造成机器人的性能损失,确保高效生产。


越疆科技的“安全皮肤”,为协作机器人的大规模采用,以及更深度的人机协作提供了可能。“安全皮肤”即装即用的特点降低了使用门槛,无论从更替、维护、成本等方面,都具有不可替代的优势,充分满足了效率与安全两大需求,“安全皮肤”的研发与应用也为协作机器人进入更多场景的应用打开了大门。
(转载)




