
西班牙集成商eProject4是一家工业工程公司,专门从事CNC机械设计、建造及生产,为自动化和机器制造的所有生产过程提供全面的解决方案,在该领域拥有极高声誉。eProject4提出针对金属加工的创新自动化解决方案Dinamtrack系统,可简化复杂零件的图像控制处理步骤。其中,史陶比尔的uniVAL plc可实时处理3D扫描信息,实现机器人和CNC控制器之间的数据交换。
挑战
金属加工需满足高精度、稳定性和刚性要求
机器人自动化已稳步进入金属加工行业,它们在其中承担铣削和去毛刺等任务,还能够在复杂的变速箱中钻孔,进行高精度切削螺纹,以便将金属件的上下两部分牢固地装配在一起。这个过程需要机器人由始至终都能精确地夹持、固定工件。
传统机器人对工况变化没有意识,一旦开始加工,存储在控制器中的程序便会自动运行。必须精确定义初始条件,确定之后不得更改。
eProject4团队则希望在生产条件与初始规范不相符的情况下,也能实现生产流程完全自动化且无错误地运行。即使对变速箱壳体零件的夹紧操作有误,也能以恒定精度来钻孔。
解决方案
机器人、CNC控制器和3D扫描仪的深度集成
eProject4工程团队在变速箱壳体上实现了自动化打孔,并在此过程中提出一种高度创新的解决方案。由eProject4开发的Dinamtrack系统将复杂的系统简化,并实现智能控制。机器人可以在该工作站执行车削和铣削任务,并直接从CNC控制器接收命令,以便加工出高质量的工件表面。
在Dinamtrack项目中,机器人与CNC控制器深度集成,3D图像处理监控操作并向控制器提供实时数据,根据情况执行任务。机器人必须能够“看到”自己在做什么。为此,齿轮箱上应当提供扫描仪可以识别的参考点。前提条件是机器人必须具有高精度,这也是选择史陶比尔TX系列机器人的原因。
另外,扫描仪、CNC控制器和机器人之间需要确保直接实时连接。史陶比尔开发的uniVAL plc接口可以满足此要求,它使用户可以通过PLC或CNC控制器中的功能模块对机器人进行编程和控制。该上级控制系统可以通过标准现场总线连接到其他控制器,也能够连接到3D扫描仪。其结构简单而强大,可以使机器人运动序列适应3D扫描仪实时传输的信号,因而非常实用,完全满足Dinamtrack项目要求。

客户应用
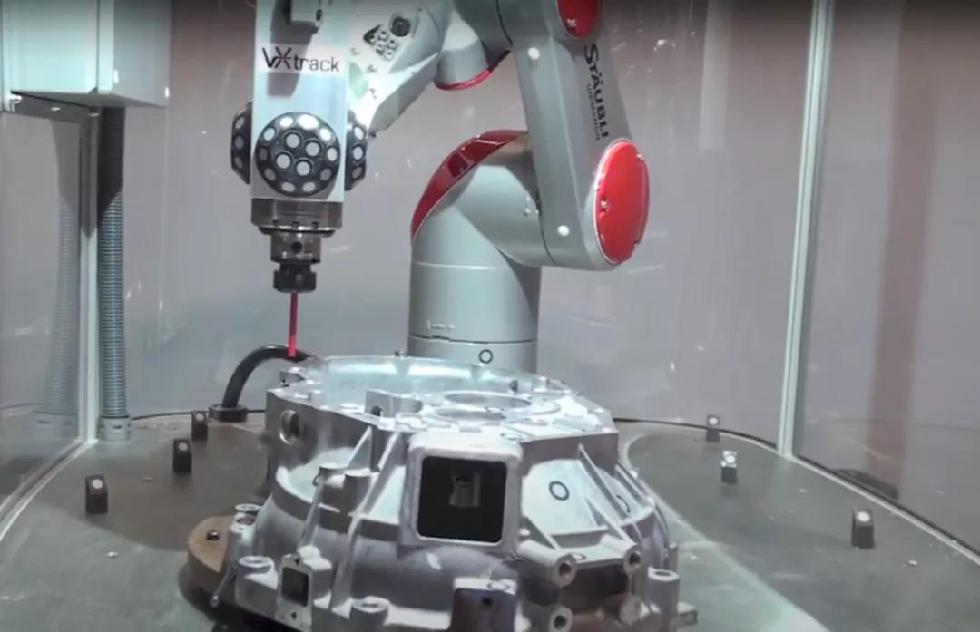
倾斜位置的史陶比尔TX机器人精准垂直钻孔
Dinamtrack系统的优势在检查加工过程时显而易见。机器人通过3D扫描仪进行监控,可以找到要切削的孔。如果操作员松开夹紧系统,将楔子放置在变速箱壳体下,使其不固定在工件支架上,机器人仍会照常接近工件。经过短暂停顿,即在收到3D扫描仪的信号后,机器人将工具倾斜放置到孔的正确角度。然后,它将工具调整到传感器检测单个工件的位置。
这要归功于3D扫描仪执行的外部测量过程,将工件的实际位置与存储在控制器中的3D模型进行比较。然后,机器人接收“偏移量”输入,在定位工具和加工工件时,机器人会考虑该“偏移量”,以便实现精准定位。
如果没有如此强大且实时的交互接口,就无法实现机器人、CNC控制器和3D扫描仪的特定工作组合。据eProject4介绍,Dinamtrack项目也可以使用更大的机器人,如配备了uniVAL plc接口的史陶比尔TX200。
eProject4公司项目经理说:“史陶比尔机器人赋予加工过程极大的灵活性,特别是铣削复杂的零件。除了独特的控制性能外,机器人的高精度和高动态性也是项目的亮点。史陶比尔在高度专业化操作方面提供了大力支持,尤其是利用uniVAL plc接口将西门子 CNC控制系统连接到机器人。”

客户收益
提升工件成品质量
高精度性能,精准钻孔
实时且强大的交互接口
设计简单,操作灵活
(转载)

