
01、UR服务支持平台
02、机器人电缆套件
03、新的故障排除工具:日志查看器UR Log Viewer
04、优傲学院核心在线培训
05、软件更新:SW5.9 和 SW3.14
06、新优傲 + 产品
MyUR服务支持平台
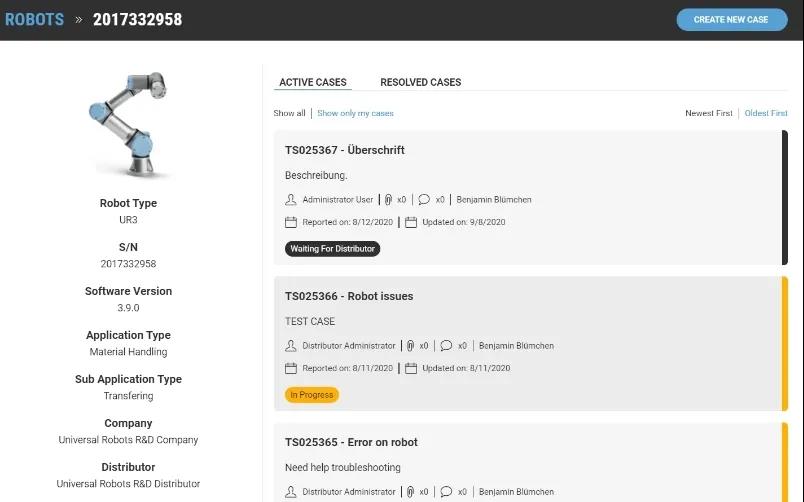
优傲机器人一直以来都致力于为客户提供优质的体验,确保我们的客户、合作伙伴和终端用户在使用我们的产品时能在最短的停机时间内快速解决问题。使用我们的新平台“MyUR”,可方便快捷地创建服务和支持案例,确保在解决问题时每个案例都得到妥善记录,并保证更快的响应时间。
我们的合作伙伴可通过该平台获取所有已出售机器人的序列号以及终端用户的信息和保修详情。每位合作伙伴都将获得一个经销商管理员账号,他们可通过该账号为每位保修人员创建更多的经销商用户账号。此平台旨在简化存入和追踪案例的流程(包括与每个机器人关联的历史数据),使合作伙伴可方便地从一个平台存取数据。
已购买service360服务的终端用户也可用同样的方法在MyUR平台上管理机器人或新增案例。如此一来,终端用户就可以直接向合作伙伴和优傲技术支持中心提出案例,并保证在4小时内得到响应。
机器人电缆套件

客户将优傲机器人部署到工业应用,通常可获得卓越的灵活性和多种多样的功能。我们新推出的 e 系列电缆套件,进一步提高了质量标准。
全新e系列系统现推出了一款底座法兰连接器以及一款长六米的可拆卸机器人电缆。底座法兰连接器使更换电缆变得更便捷,维修机器人也变得更简单。
有了底座法兰连接器,用户可自行选择适合应用场景的电缆:用于固定装置的加长电缆或者用于七轴动态安装的高柔性电缆。标准电缆和高柔性电缆均可用于 6 米或 12 米的配置中。
新故障排除工具:
日志查看器(UR Log Viewer)
长期以来,日志阅读器都是帮助客户理解其日志文件信息的首选工具,如今日志查看器(UR Log Viewer)在此基础上再添新功能。
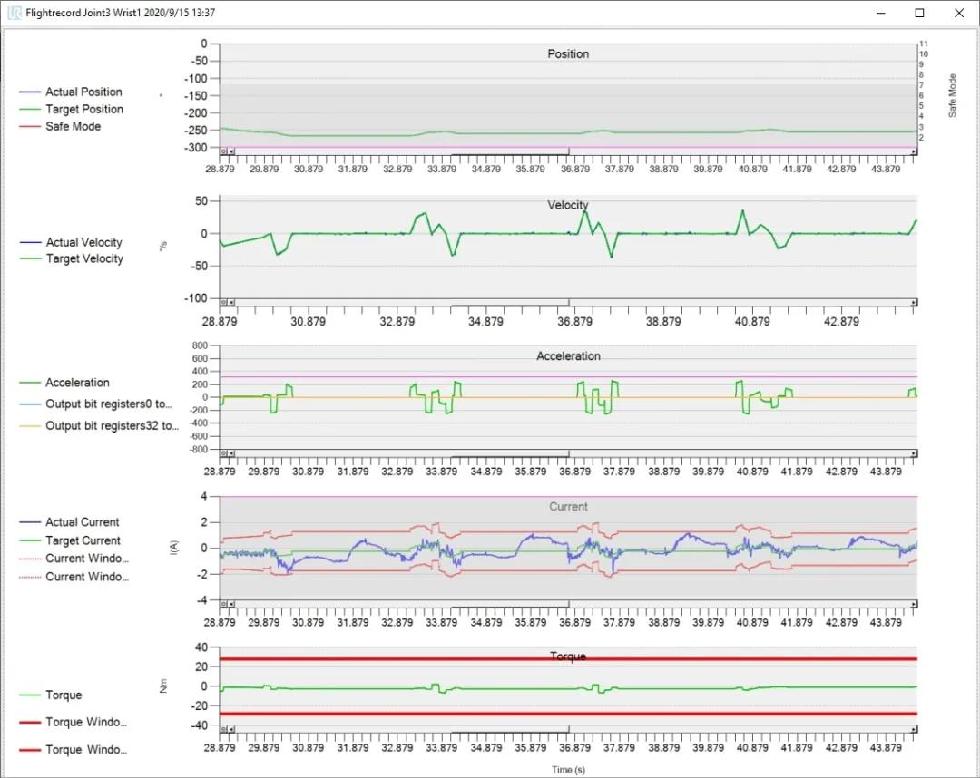
除了显示日志信息外,新优傲日志查看器(UR Log Viewer)还可提供关键日志事件摘要,并允许用户查看计划外停机时自动生成的(flight record files)。每个(flight record)都包含了保护性停机或故障发生前 30 秒捕获的实时数据(包括关节位置、速度、加速度、电流、扭矩等)。该工具适用于 CB3 和 e 系列记录。从现在起,我们的标准服务培训将涵盖(UR Log Viewer)的使用。
优傲学院在线培训
受当前新冠肺炎限制措施的影响,许多线下课堂培训暂时搁置,我们正努力将更多广受欢迎的优傲学院培训课程转移到线上进行。
新推出的核心在线培训旨在为已购买机器人的经销商和终端用户提供由优傲认证培训师指导的培训。为了适应在线培训所带来的挑战,我们对核心培训进行了一些调整,使得在线课程的参与者可获得与课堂培训相同的培训效果。 我们增加了练习的数量,并允许用户在自己的末端执行器和硬件上进行实操。
在某些情况下,参与者可仅使用 URSim(无需使用真正的机器人)即可完成培训。请联系您当地的培训团队,了解您所在地区的培训计划。
软件更新:SW5.9 和 SW3.14
CB3 和 e 系列机器人均已发布新软件版本。除了已识别故障的修复外,以下汇总了一些新功能。
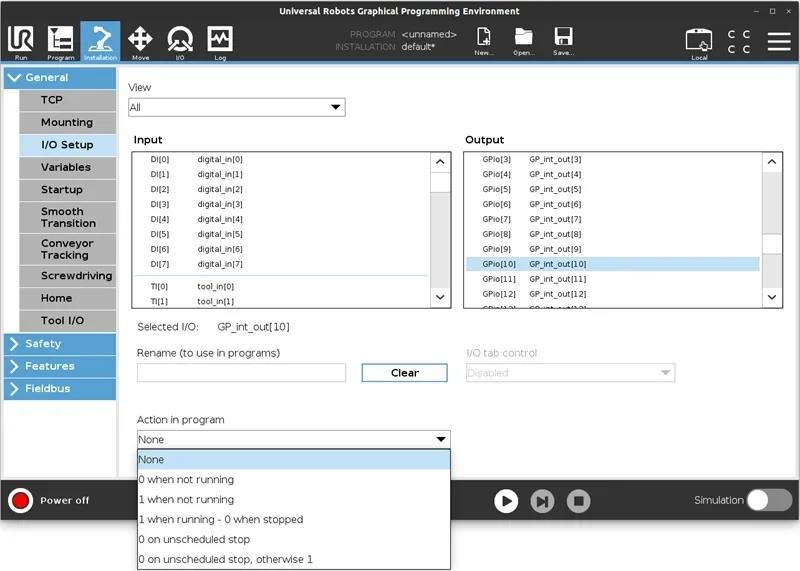
意外停机输出功能(仅适用于 e 系列)
新增了输出功能,以显示程序是否已因意外的停机(包括保护性停机、故障、违规或运行时异常)而终止时输出信号。
扩展到寄存器的输出功能(适用于 e 系列和 CB3)
输出功能(如上面提到的新的意外停机通知)现在可应用于通用寄存器(布尔、整数和浮点)和 Modbus 寄存器,以及数字和模拟输出。此功能可用于向连接的设备(如监控这些寄存器的可编程控制器)提供程序的运行状态。
标量计算支持的二维阵列(适用于 e 系列和 CB3)
现在,通过扩展对列表类型变量的使用,可定义多行矩阵。这也包括像矩阵乘法、转置和求逆转这样的运算。有关矩阵使用和功能的详情请见 UR 脚本手册。
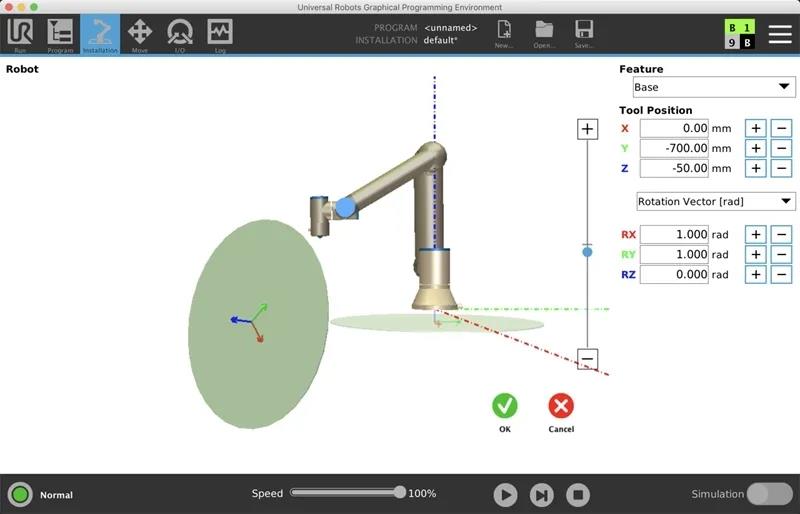
工作范围外的特征(仅适用于 e 系列)
新增了一个“编辑”按钮,可以直接输入已知坐标,定义某特征的位置和方向。此前,若需要创建一个特征,该特征需要在机械臂物理工作范围内才可实现,此更新使我们得以逾越此限制。
过度磨损风险通知(适用于 e 系列和 CB3)
执行会导致高扭矩水平或急剧达到扭矩峰值的程序时,可能会损坏机器人的硬件,为此我们在日志文件中引入了新的预警级别代码。C173Ax 表示关节扭矩水平超过变数箱额定扭矩;C174Ax 表示急剧达到扭矩峰值。当像这样的预警出现时,可使用脚本函数 pause_on_error_code 停止机器人运行。
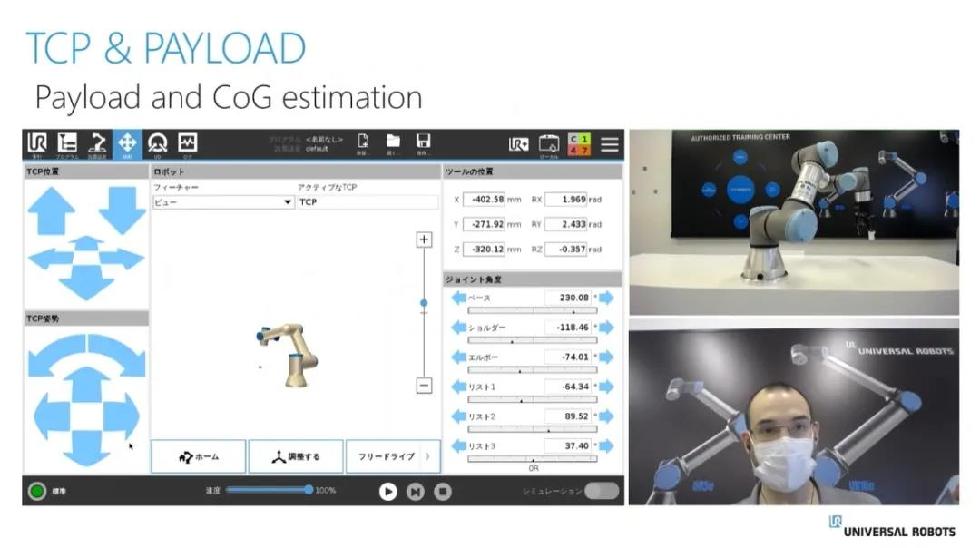
有效载荷通知(适用于 e 系列和 CB3)
Polyscope 界面上将会出现通知,提醒程序员在安装时输入有效载荷。只要有效载荷设置保持在 0 千克,该信息会一直出现。
新UR+产品

(转载)

