
在中小批量生产中,越来越多的用户在考虑采用自动化夹持方案。通过机器人搬运托盘实现自动化上下料,同时也可以快速稳定地更换夹具。在此过程中,工件和夹具提前置于托盘,存放在储存架上,依次由机器人从托盘存放架传送到机加工中心,其中的关键元件是快换托盘系统。

雄克产品构成的自动化上下料夹持系统
专用搬运模块VERO-S NSR
为了确保自动化生产中托盘更换的过程稳定,建议使用专用搬运模块 — 干涉轮廓非常小的雄克VERO-S NSR轻型联轴器。在狭窄空间中以及靠近机床工作台的位置均可进行托盘上料。NSR共有三种型号:通用模块NSR 160仅重1,600g,微型联轴器NSR mini重量仅为400g, NSR maxi用于重型托盘的搬运 (极限扭矩载荷:Mx=4000Nm,My=4000Nm)。NSR联轴器采用全密封型结构,能够有效预防切屑和冷却液进入结构内部,标配有端面清扫功能。
模块化系统实现更有效的托盘解决方案
如视频中描述,将快换托盘与雄克全系列模块化工件夹持系统中的各类夹具组合使用,组合方式可达千种。例如,将气动虎钳TANDEM组合在托盘上,构成了特别紧凑的夹持方案,使加工效率进一步提升,操作方便、装夹时间短。

下图为托盘上装有带VERO-S快换模块的夹具塔,可在卧式加工中心内快速更换夹具和工件。

应用于无气液介质供应的经济型机床自动化方案
对于内部未设有介质通道的机床而言,可以使用VERO-S介质联轴器实现自动化上下料。VERO-S模块和气动夹具均通过机器人侧提供气源驱动。所有标准的雄克VERO-S NSL plus和VERO-S NSL 3夹持系统均可进行这一改装*。介质联轴器的安装方式可防止在驱动或托盘上料过程中发生轮廓干涉。

技术参数说明:
● 对机器人位置精度的要求:径向±0.3mm,轴向+0.5mm
● 连接的力受机器人、夹持系统和夹持装置影响。
*通过零点快换托盘来实现介质传输的设计无法改装。
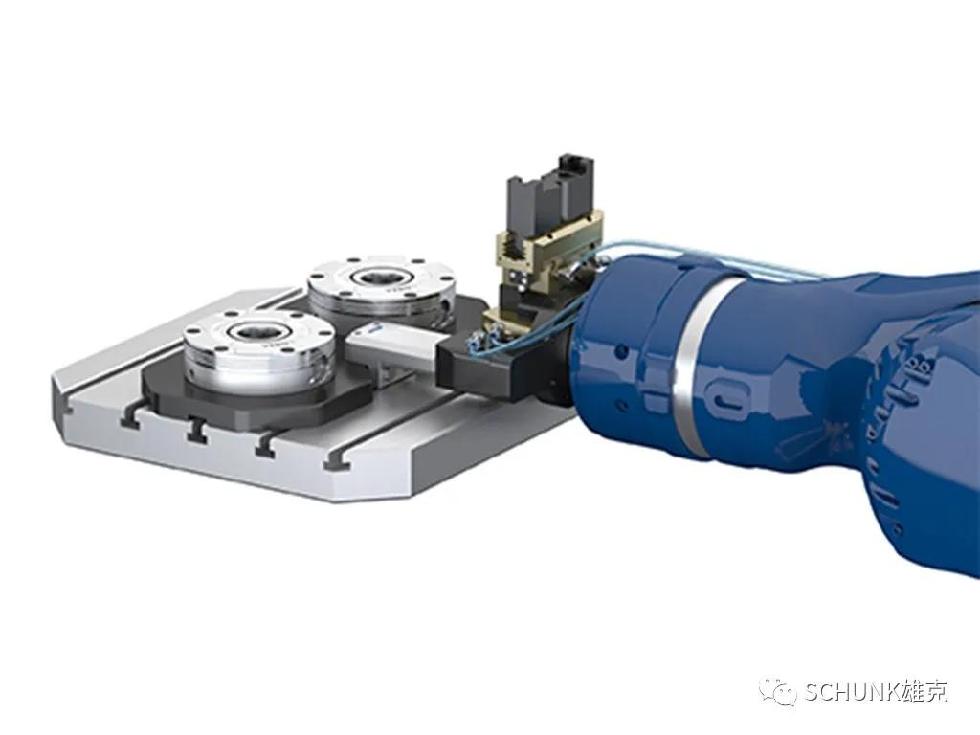
1、机器人通过介质联轴器打开零点快换
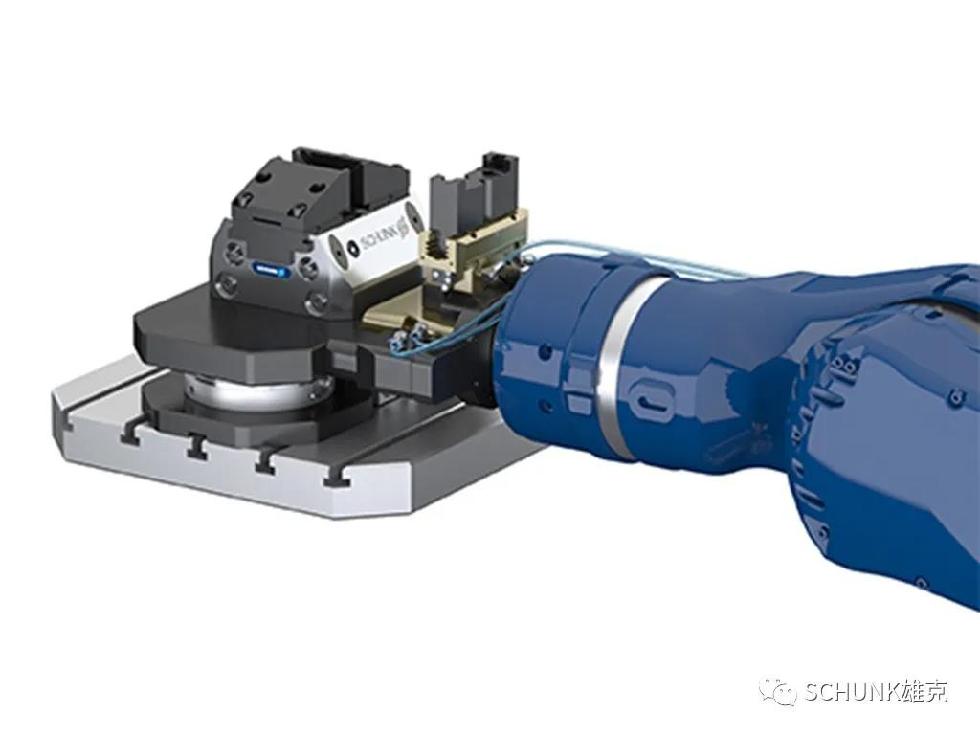
2、机器人将虎钳装于快换系统上,并将虎钳打开

3、机器人移动并离开

4、自动上料
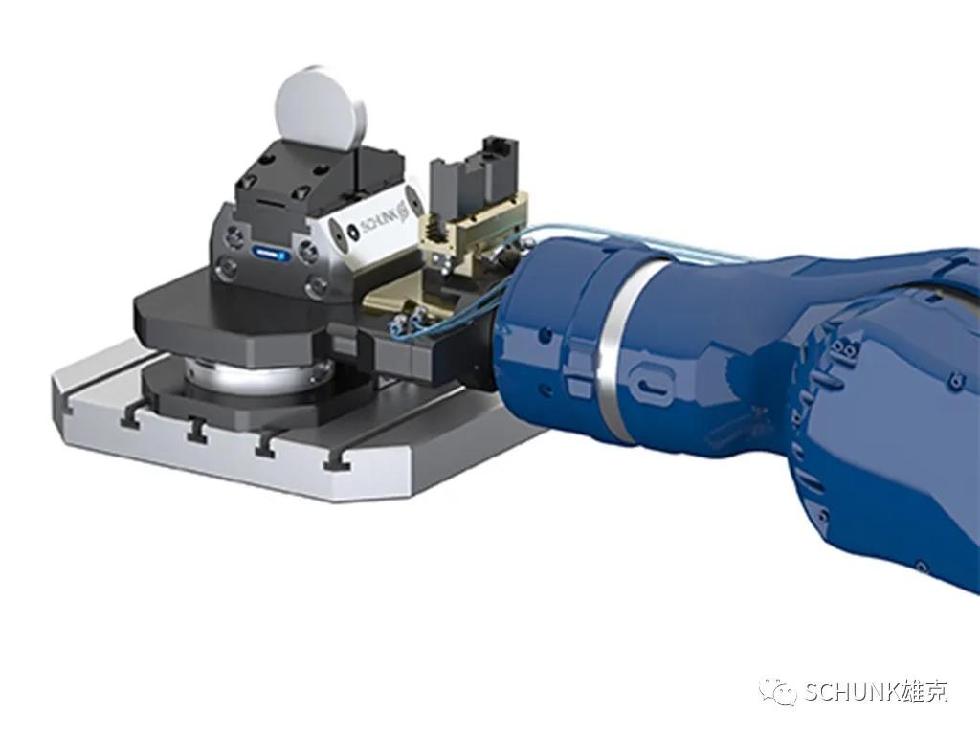
5、机器人将虎钳闭合夹紧
(转载)

