
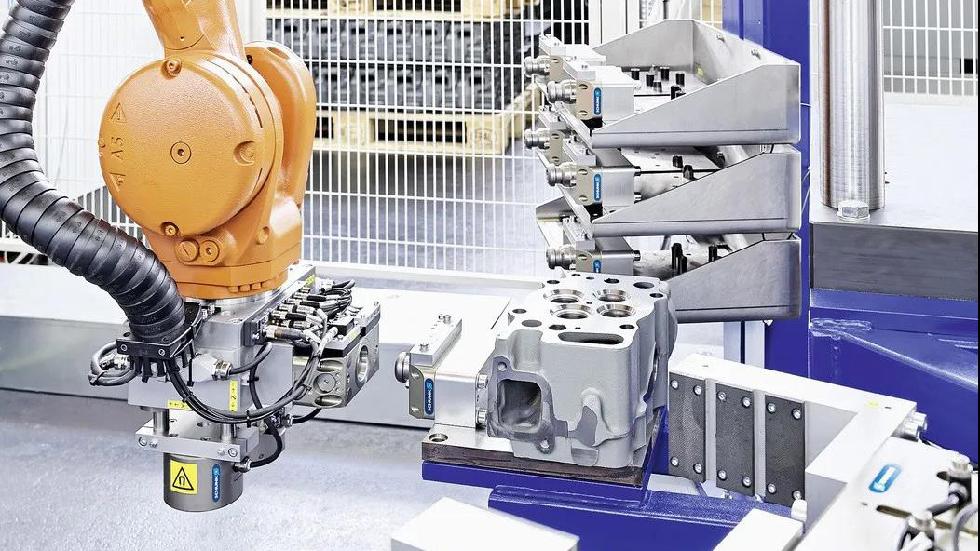
在缸盖组件的装配工艺中,雄克为客户提供了整体的柔性抓取解决方案。针对多种型号缸盖组件的自动化装配需求,雄克选用了磁力抓取,则无需考虑外形干涉,同时集成了机器人联轴器,优化了方案设计。
工件
缸盖组件
任务
无人生产14种不同型号的缸盖组件。在全自动生产中,确保可靠的部件搬运与精准定位。
抓取方案
机器人上的抓取单元由两个EGM磁力机械手和NSR-A联轴器组成,先由EGM搬运重量20至25kg的缸盖组件,将其放置于对应尺寸的工件托盘中。

然后,机器人再通过联轴器NSR-A抓取托盘,将其放于压装工位。
由两个通用机械手PGN-plus抓取阀导和阀座置于液氮中,手指经特殊设计,可以抓取不同的零件直径。

雄克产品
EGM磁力机械手
▍高能效电永磁机械手
▍最高可搬运工件重量118kg
NSR机器人联轴器
▍专利锁定机构
▍可搬运托盘重量达1000kg
PGN-plus通用机械手
▍专利多齿导轨技术,有较大抓取力及高力矩
▍提供针对恶劣环境的特殊型号及可选附件

方案优势
采用磁力抓取方式时,无需考虑轮廓干涉,夹持位置可灵活选择,并且多个磁力机械手可以轻松地组合成更大的抓取单元,这意味着可抓取的工件规格非常灵活。EGM-M单极磁力机械手采用了高能效的电永磁材料,只需一个脉冲即可上/退磁,即使在紧急停机或断电时,仍能牢固夹持工件。
汽车行业中,产品更新换代的间隔缩短等因素造成传统的发动机缸体、缸盖夹具有一定的局限性,比如不能重复使用、不能适应自动化生产等。雄克的零点快换产品在国内外的汽车发动机缸体、缸盖生产线上均有非常丰富的方案经验。
4月19日(周日)下午15:00,雄克将于“金属加工”杂志社举办的“2020先进汽车制造技术在线论坛”中重点介绍发动机制造工艺的夹具方案。
(转载)

