
为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。
仙知小课堂
之前分别介绍了如何查询机器人载入的地图以及储存的地图、如何查询机器人当前载入地图中的站点信息、如何查询机器人参数等,本期将介绍“API列表”、“停止开环运动”及“重定位”:
API列表
请求

响应
机器人控制 API 的响应会立即返回给客户端,并不会等待机器人置信完毕。若 ret_code 不存在,说明指令将被执行,但并不表示指令已经执行完毕了,对于有些控制指令,如(2022) 切换地图,可以通过 (1022) 查询载入地图的状态。其他大部分指令都是瞬时的,用户不必关心机器人什么时候执行完毕,只需要知道机器人将执行指令即可。

停止开环运动
停止运动
请求
编号: 2000 (0x07D0)
名称: robot_control_stop_req
描述: 停止开环运动
JSON 数据区: 无
请求示例

响应
编号: 12000 (0x2EE0)
名称: robot_control_stop_res
描述: 停止开环运动的响应
JSON 数据区: 见下表

响应示例
略
重定位
请求
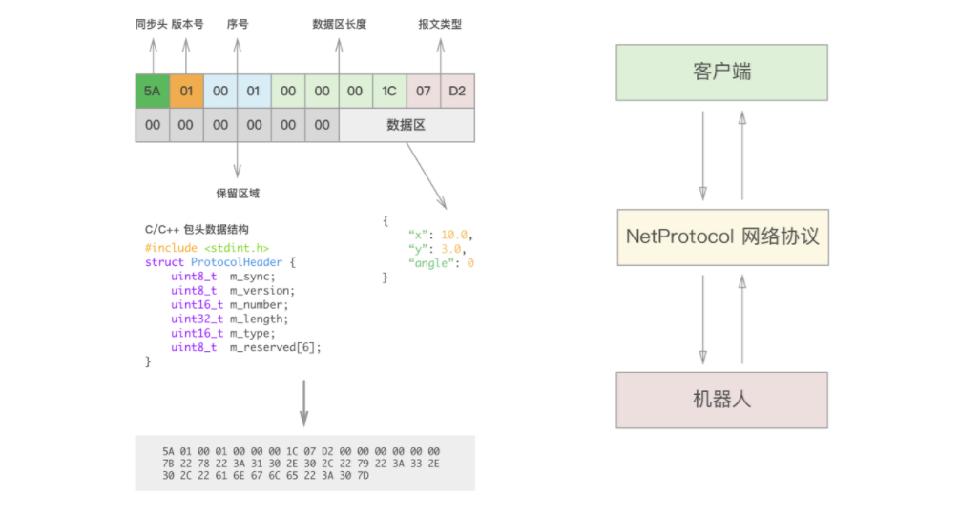
编号: 2002 (0x07D2)
名称: robot_control_reloc_req
描述: 重定位
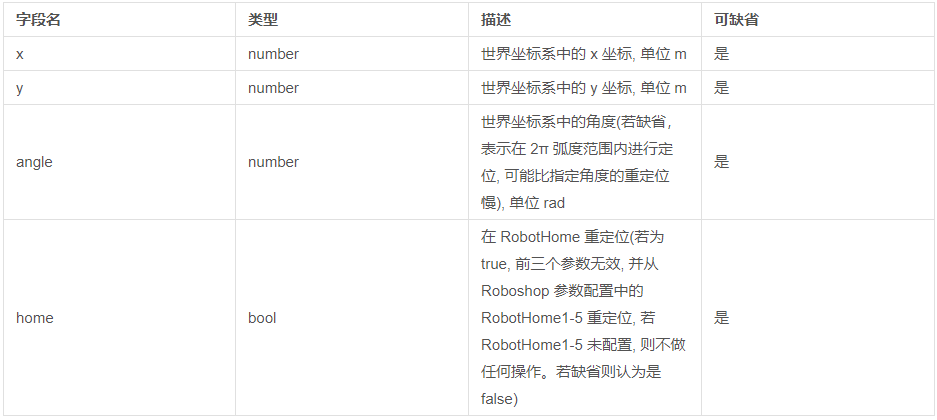
JSON 数据区: 见下表
注:不可所有参数都缺省
请求示例

响应
编号: 12002 (0x2EE2)
名称: robot_control_reloc_res
描述: 重定位的响应
JSON 数据区: 见下表

响应示例

更多仙知网络协议API使用教程
后期将会陆续推出
敬请关注下期
仙知网络协议API使用教程(十四)
(转载)

