
近年来,随着电商、快递、新能源等新兴行业发展,加之传统的汽车工业、家电制造、3C电子制造等传统制造业转型升级,智能仓储、搬运需求旺盛,促进了移动机器人产业快速发展。
随着移动机器人技术的逐渐成熟,建图、定位、导航、避障等90%的基础功能已经不再是移动机器人的应用障碍。但是由于存在一定的技术要求,不同的移动机器人产品所表现出来的性能也不一样。
自主导航
随着柔性生产与智能物流的推进,传统的磁条导航、磁钉导航、二维码导航弊端便凸显出来,灵活性普遍较低,并且需要对用户现场环境进行改造,不利于柔性生产及机器人自主导航。激光自然轮廓与视觉导航这两种方式的无需对现场环境进行改造,施工难度低,自主灵活性强,逐渐得到市场的喜爱。但两者相比较而言,由于视觉导航对使用环境的光线要求较高,抗干扰能力差,所以市场上最受欢迎的移动机器人产品还是以激光导航为主,是无轨化导航的主流方式。

为满足用户现场柔性、高效、安全与人机交互的复杂场景下使用需求,仙知机器人采用混合导航的方式,在激光自然轮廓导航的基础上,加入3D视觉传感器,对地面上的坑洞及立体障碍物进行识别检测;并在长廊、高动态等复杂场景下,还可在指定区域内自动切换至激光反光板导航或二维码导航,多种导航方式确保移动机器人安全稳定的运行。
自主定位
定位精度通常指重复到位精度,也是考验移动机器人性能的重要关键指标。由于移动机器人通常使用在搬运、堆高及产线对接等物流搬运环节,如果重复到位精度较差,就难以实现物流自动化与货到人的无人化运输。仙知机器人通过激光SLAM算法实现了高精准定位,激光无反(反光板)的重复定位精度在±5mm*以内。在某些特殊的站点需要机器人与工作站精准对接时,还可通过增加二维码的方式进行精准定位,实现更高精度的对接需求。
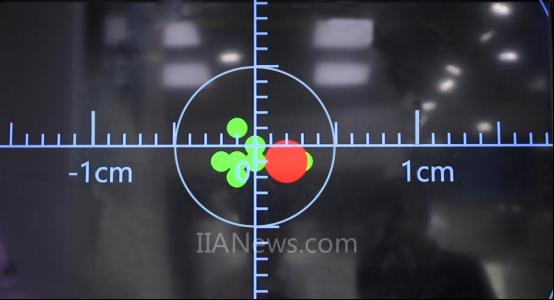
*实际值取决于环境条件
地图构建与路径规划
无论是激光导航还是视觉导航,都是通过SLAM技术实现的。由于每个移动机器人提供商相对应的操作软件不一样,地图构建的方式也不相同,有的简单方便,有的费时费力。仙知机器人提供的可视化操作软件Roboshop,作为移动机器人一站式实施工具,在地图扫描过程中,可以通过无线遥控或手柄遥控进行地图扫描,单幅地图面积最大可以达到20万平方米,适用于大型车间、仓库;在Roboshop中还有地图拼接的功能,对于面积大、多楼层、多场景的车间与仓库,可使用地图拼接功能来满足使用需求。
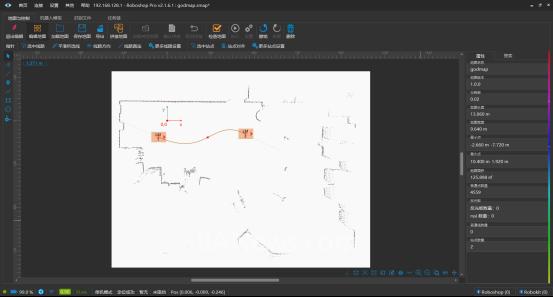
地图构建完成后,便需要进行站点部署及机器人路径规划。在仙知机器人可视化操作软件Roboshop中进行地图路径规划时,由于软件中有三阶贝塞尔曲线,可进行任意曲线编辑,方便用户根据实际场景进行操作,轻松实现对移动机器人的路径规划。
自主避障
目前来看,在绝大多数用户现场还是人机混合场景,为保证人员与货物的安全,自主避障性能也是考验移动机器人的重要因素。根据不同的工况场合及用户现场情况,仙知机器人拥有不同的解决方案来确保移动机器人自主避障的实现。如在简单的工况场合,通过双激光导航移动机器人即可满足使用条件;如现场地面环境有坑洞等情况,可通过增加3D视觉传感器进行识别检测,并根据配置选择停障或绕行;对于复杂的人机混合工况场合,可增加红外光电传感器、超声、避障激光传感器、安全触边等多种方式确保人员和货物的安全,让移动机器人的安全性能达到最佳。

而要满足大规模工业化使用需求,仅仅实现建图、定位、导航、避障等这些90%的基础功能还难以应对复杂的现场情况,还有10%的应用课题需要一一解决。比如用户现场总是存在车间环境动态变化大、用户现场需求变更难以及时解决、多台移动机器人无法共享同一张地图、不同类型的移动机器人不能统一调度等。
(1)车间环境动态变化大
如果用户现场有长廊或是车间环境动态变化大,有些移动机器人产品会出现定位丢失而引发不可预估的危险情况。
仙知机器人在SLAM基础上结合多传感器,增强定位导航稳定性的同时,加入了对场景语义的理解,真正做到了自动化与智能化的完美融合。
(2)客户现场需求变更
由于用户现场车间生产的复杂性,有时需要临时调整移动机器人的工作任务,这时通常需要专业工程师及时编写代码、修改脚本,费时费力。
仙知机器人自主研发的可视化操作软件Roboshop,作为移动机器人一站式实施工具,从基础的地图构建,站点、路线及区域编辑,到机器人的自动标定、任务序列编辑都可通过Roboshop快速实现,大大降低了工厂车间的实施成本。
(3)产生较大的运动误差
在移动机器人大规模应用过程中,由于移动机器人物理参数、运动性能、控制延时等多种因素的影响,多台移动机器人共享同一张地图的时候会产生较大的运动误差;如果重复建图又会增加大量的工作。
仙知机器人采用基于地图的多传感器系统辨识技术,对每个机器人的物理参数、运动性能、系统延时进行实时标定,即使多台移动机器人同时作业,也无需重复建图,保证了多车运动的一致性,大幅提高了现场实施效率。
(4)不同类型的机器人无法统一调度
现代化工厂通常需多类型、多数量移动机器人协同工作,如搬运机器人、复合机器人、自动叉车等,而现有的调度系统总是无法对不同类型的移动机器人进行统一调度与部署。
仙知机器人提供的可视化管理系统 RoboGlue和多机调度系统RoboRoute可同时对上百台多类型的移动机器人统一调度,保证安全性的同时大幅度提高了作业效率;另外仙知软件系统对外提供简洁易用的HTTP接口,能与用户MES、WMS系统无缝对接,满足工厂智能化的需求。
基于以上环境普适性、操作可视化、多车一致性、调度通用性四大技术优势,仙知机器人不仅从基础的地图构建、路径规划,到自主定位导航与自主避障具有卓越性能,同时在用户现场能够应对各类移动机器人应用难题,助力客户真正实现智能物流及智能制造。
(转载)

