
为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。之前分别介绍了仙知网络协议API的概念、类别、使用教程及如何查询机器人状态API中的“机器人信息”和“机器人运行信息”等,本期将介绍“如何查询机器人超声传感器数据”、“如何查询机器人二维码(PGV)数据”及“如何查询机器人导航状态”:
如何查询机器人超声传感器数据
查询机器人的超声传感器数据
请求
编号: 1016 (0x03F8)
名称: robot_status_ultrasonic_req
描述: 查询机器人的超声传感器数据
JSON 数据区: 无
请求示例

响应
编号: 11016 (0x2B08)
名称: robot_status_ultrasonic_res
描述: 查询机器人的超声传感器数据的响应
JSON 数据区: 见下表

object 形式如下:
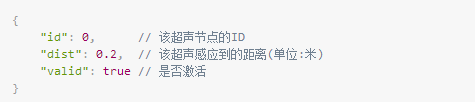
获得 id 和 dist 后需要根据模型文件中相应超声的配置来换算成世界坐标系中的值。
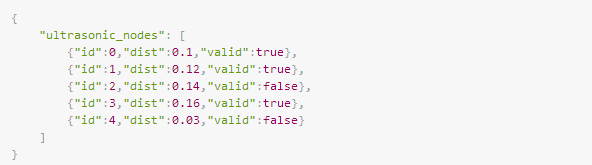
数据示例
如下为五个超声节点的数据:
响应示例
略
如何查询机器人二维码(PGV)数据
查询二维码数据(PGV)
请求
编号: 1017 (0x03F9)
名称: robot_status_pgv_req
描述: 查询二维码数据(PGV)数据
JSON 数据区: 无
请求示例
略
响应
编号: 11017 (0x2B09)
名称: robot_status_pgv_res
描述: 查询二维码数据(PGV)数据的响应
JSON 数据区: 见下表
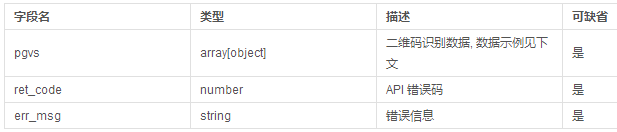
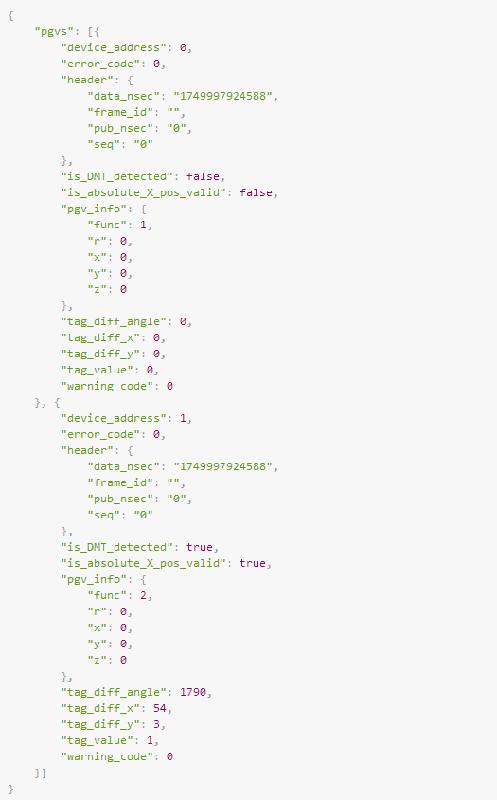
object 形式如下:
主要关注 device_address(PGV 设备的 ID)和 tag_value(二维码标签的数据)
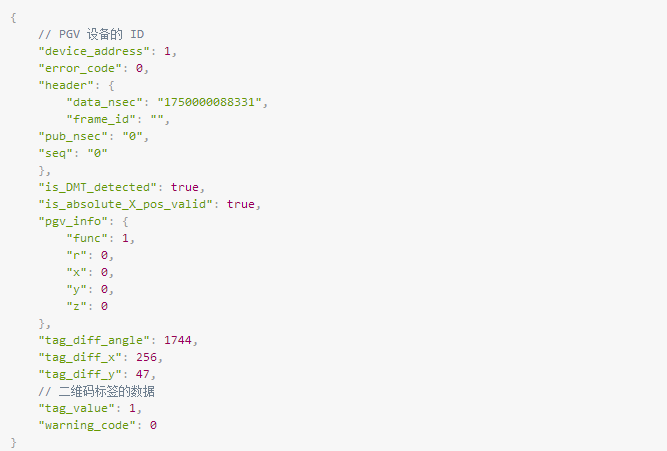
数据示例
如下为两个 PGV 设备的数据:
响应示例
略
如何查询机器人导航状态
查询机器人导航状态
请求
编号: 1020 (0x03FC)
名称: robot_status_task_req
描述: 查询机器人当前的导航状态, 导航站点, 导航相关路径(已经经过的站点, 尚未经过的站点)等
JSON 数据区: 见下表

请求示例


响应
编号: 11020 (0x2B0C)
名称: robot_status_task_req
描述: 查询机器人当前的导航状态的响应
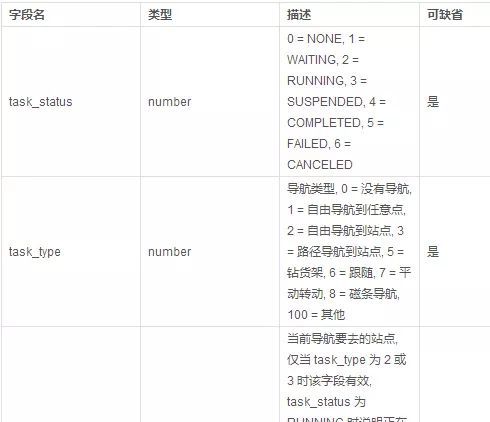
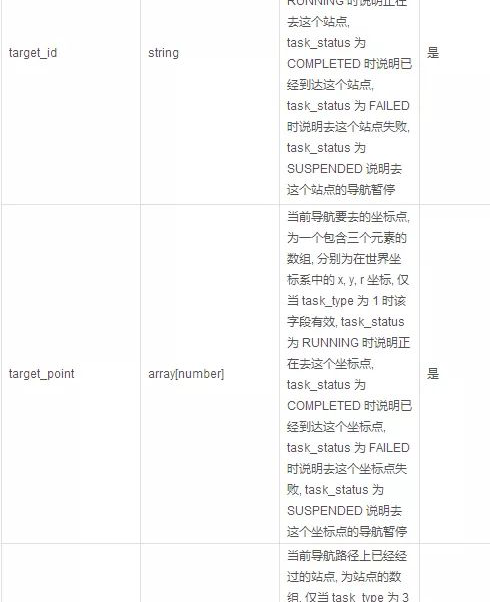
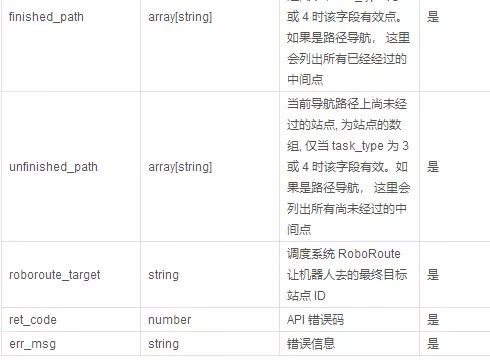
JSON 数据区: 见下表
注:如果只返回简单数据,则下表的字段中只有 task_status
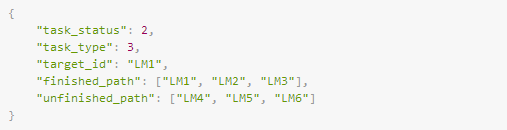
数据示例
如下数据表示机器人正在使用路径导航的方式去 id 为 "LM6" 的站点, 已经经过的站点为 LM1, LM2, LM3, 尚未经过的站点为 LM4, LM5, LM6
如下数据表示机器人正在使用自由导航的方式去世界坐标为 (1.2, 2.3) 的点

如果只返回简单数据(数据区只有17个字符):

响应示例
略
更多仙知网络协议API使用教程
后期将会陆续推出
敬请关注下期
仙知网络协议API使用教程(九)
(转载)

