
项目背景
目前国内很多工厂车间、电商仓储的物料运输还主要依赖人工完成,无法满足现代工业自动化、柔性化、智能化的生产要求。随着移动机器人在现代工业中被广泛应用,替代人工完成了大量工艺操作,如高效精准上下料、最优分配任务等,不仅有效降低了企业生产成本,而且大幅提升了工厂物流运输的效率。
客户课题

北京三一重工股份有限公司是一家从事工程机械研发、制造、销售业务的大型企业,其中用于生产风力发电机的风电设备车间由于占地面积大(约20000㎡)、路线状况复杂等原因,主要依靠传统的人工叉车运输方式,从而导致车间物料运输过程中存在运输工作量大、人工叉车效率低、精准度低等问题。同时,人工运输效率低、易出错,劳动强度大,管理成本高。
仙知方案
为解决风电设备车间物料运输中的诸多问题,北京三一重工提出了移动机器人物料运输系统化解决方案的需求,经过层层筛选,仙知机器人某集成商中标该风电设备车间物料运输系统化改造项目。该项目的成功实施,解决了车间物料运输过程中遇到的各种问题,进而达成高效、精准、自动化运输物料的目标。
软、硬件配置
硬件:SRC系列核心控制器、基于SRC的潜伏顶升移动机器人(2台)、充电桩(2台)
软件:Roboshop、RoboRoute
具体实施流程
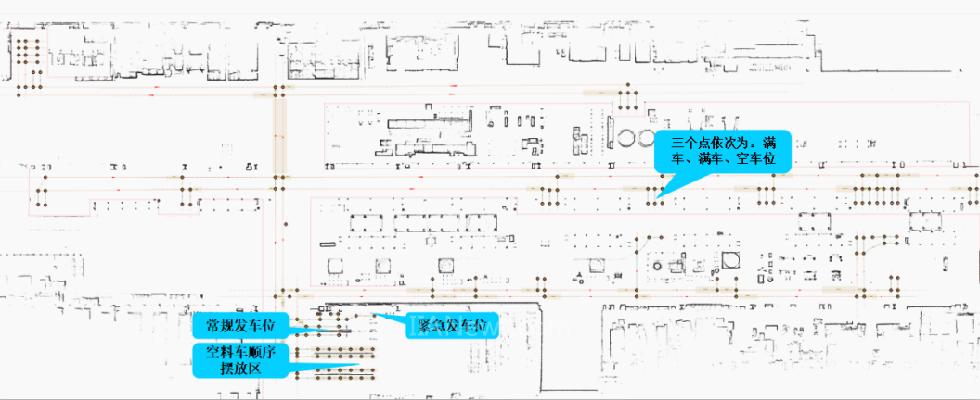
(Roboshop实施图)
(1)通过扫码枪采集相应信息到现场MES系统,MES系统生成任务订单,然后通过RoboRoute Web API通讯协议将订单信息发送给RoboRoute调度系统;
(2)调度系统安排合适的移动机器人来发车区取走满料车并送至相应的工位;
(3)移动机器人将满料车送至工位相应的停放区,放下满料车并自动检测空车位上有无空料车,若有则将空料车取回并自动计数放在空料车摆放区;
(4)采用麦克纳姆轮式潜入举升移动机器人,可进行平动并有效规避转弯半径问题,解决车间通道较窄地方的通过性问题。
实施难点及对策
难点:车间面的巨大、工位分散;运输物料种类多、需求数量多。
对策:仙知机器人选配长距离激光传感器,解决了车间面积大的问题;多机调度系统RoboRoute会自动进行机器人工作任务最优分配,解决了工位分散、运输需求多的问题。

给客户带来的价值
本次改造完成的移动机器人物料运输系统,大幅度提升了北京三一重工风电设备车间的智能化和自动化程度。两台潜伏顶升式搬运机器人实现了24小时不间断、高效精准运输生产车间的物料。仙知移动机器人物料运输系统化解决方案的引入,高效解决了风电设备车间运输量大、人工叉车效率低、精准度低等难题,并大大提升了车间作业的安全性。以最少化的投资,实现了北京三一重工风电设备车间自动化、智能化、系统化运输车间物料的目标!
仙知优势
可视化操作软件Roboshop

通过可视化操作软件Roboshop,快速进行地图构建、设定机器人的运行线路及工作任务,大大降低了三一重工风电设备车间实施成本。
多机调度系统RoboRoute
利用多机调度系统RoboRoute实现了多机协同作业,高效完成灵活分配发车任务,智能优化车间物料运输的生产节奏。
高精度的激光SLAM技术

仙知通过激光SLAM算法实现了高精准定位,机器人可高效精准的完成搬运工作,大大提升了车间的自动化程度,最终帮助客户实现了风力发电机生产车间运输的无人化作业。
(转载)

