
近来年,移动机器人技术在世界范围内得到了大力发展,机器人的导航技术也随之快速迭代发展,从之前的磁条导航、二维码导航,到现在受欢迎的激光无轨导航。
对于不需要在地面铺设磁条的激光无轨导航,又分成反射板导航式和自然轮廓导航式(无反射板)。
反射板导航式

反射板导航是在移动机器人行驶路线周围的一定距离放置反射板,机器人身上的激光扫描仪发射激光束,然后采集反射回来的激光束。
根据反射回来的多个激光束数据确定机器人在环境中当前的位置,配合控制器,算法等来实现机器人的自主行走。
但在生产现场周边放置反射板,一定程度上会影响现场作业进度,也给企业增加了不少实施成本。
自然轮廓导航式

所谓自然轮廓导航(无反射板),是基于SLAM的导航原理。SLAM(即同步定位与建图)指在未知的环境中,机器人通过自身所携带的内部传感器(编码器、IMU等)和外部传感器(激光传感器或者视觉传感器)来对自身进行定位,并在定位的基础上利用外部传感器获取的环境信息增量式的构建环境地图。
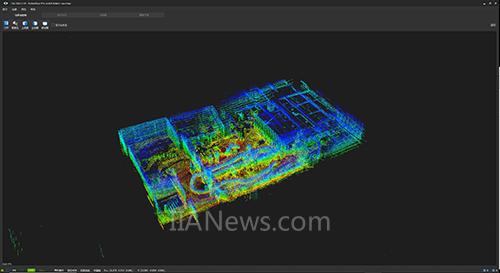
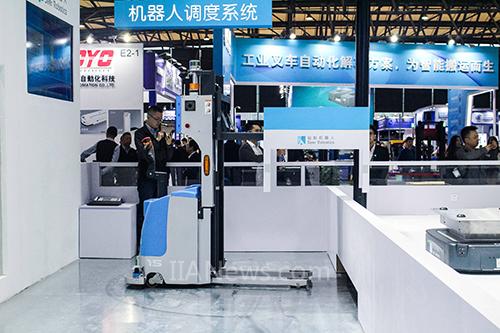
移动机器人领域内的高新技术企业——仙知机器人,自主研发的无反射板3D SLAM激光导航技术,地面无需其他定位设施,灵活方便,实现了机器人在复杂环境下的精准定位、快速部署。
仙知3D SLAM激光导航技术,实现了机器人±5mm高精度定位
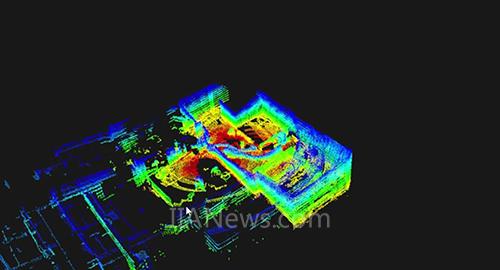
值得注意的是,仙知3D SLAM激光导航技术,加入了对场景语义的理解,使机器人具备了学习新环境的能力,即使场景再复杂,在短时间内,机器人也能灵活快速变更路径。随着应用端对场景智能化要求越来越高,无反射板3D SLAM激光导航方式越来越盛行了。
仙知在3D SLAM基础上结合多传感器,使机器人具备了学习新环境的能力
近年来,激光SLAM导航技术已取得了很大的发展,它将赋予机器人和智能制造行业强大的动力,真正推动中国制造业实现整体技术水平的提升。
参考资料:
《激光SLAM与视觉SLAM的现状与趋势》雷锋网
《被广泛应用的激光SLAM》机器学习研究会
(转载)

