
在上篇中,给大家科普了安全运动控制的小知识,如机械运动原理、安全运动系统的介绍以及安全运动控制系统和传统运动控制系统的对比,大家对这些知识掌握的怎么样啦?
回顾完上篇的内容,接下来我们就要继续介绍关于安全运动控制的新知识了。
安全运动控制的组成
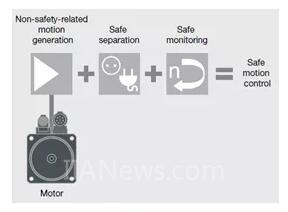
安全运动控制的目的是要避免危险的运动。传统伺服驱动器是由非安全相关的部件组成的,要实现安全运动只能通过额外的安全元件来保证电机断电,或对电机的运动进行安全监控。当今的市场正朝着往驱动器内部实现安全功能的方向发展,主要由安全隔离、安全检测和安全控制(确保无不安全运动)组成。
安全隔离
伺服驱动器分为电力回路和控制回路两部分。其中,电力回路主要由整流、电容滤波和逆变组成;控制回路主要由指令或参考变量、闭环控制、PWM调制脉冲组成。另外,电力回路和控制回路都是通过光电耦合器隔离的。
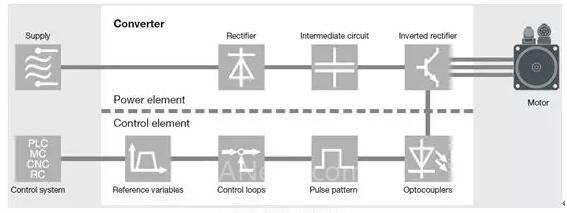
伺服驱动器原理结构图
把伺服驱动器的结构图转化为信号路径图,如下图所示。在这个图中,光电耦合器安全禁止(图注3)、设定值或参考值开关(图注4)和控制使能(图注5)被用做安全运动控制的安全隔离。由于实施难度、驱动器技术等原因,通常不用电机接触器(图注2)作为安全隔离的一部分。由于电力回路中的大电容的放电时间很长,通常在5-10分钟以上。因此供电主接触器(图注1)的断开是无法保证伺服电机是断电的。
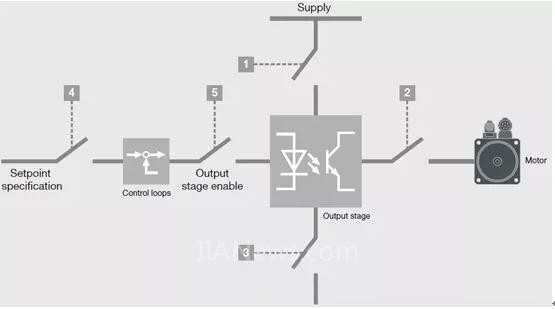
伺服驱动器信号路径图
通常情况下,只有安全检测和控制功能引发故障时,才会触发安全隔离。
1、电力回路供电主接触器,用于隔离驱动器的输入供电;
2、电机接触器,用于隔离电动机的输入供电;
3、光电耦合器安全禁止器,光电耦合器用于隔离电力回路和控制回路;
4、设定值或参考值开关,设定值将被设置为0;
5、控制使能,控制光耦的信号将被禁止;
6、安全运动检测和控制。
安全运动检测和控制
安全检测和控制不能够按照传统的检测和控制去理解,他们最大的区别在于是否能有效应对失效风险方面。在实施过程中,传统的检测和控制是不考虑检测机制及诊断范围、共因、元件高可靠性、安全系统设计等方面的。
在标准EN/IEC 61800-5-2中列出的安全功能中,需要对运动学的加速度、速度和位置进行安全监控。由于驱动器中通常使用的是非安全相关部件,因此实施过程中,除了监控驱动器的运行和状态外,还需要结合传感器技术,比如安全编码器。
安全运动控制需要的不仅仅是安全检测,更需要对运动的安全控制。最常见的安全控制是安全运动限制,安全限制有三种方式:固定值式、设定值选择式和动态修改式。固定值式是通过配置软件,事先设定好限定值,在运动中,限定值是不可改变的。选择式则是多个固定值,在运行中可以通过安全IO或安全总线切换固定值。动态修改式是运行中可修改的,比如在上次提到的机械手和人的安全示例中,安全功能根据人和机械手的距离进行安全降速,人距离机械手的危险距离越近,机械手的速度越慢。

为了满足安全控制的需要,皮尔磁提供了驱动器PMCprotego D系列集成Protego S1/S2安全卡,提供了SS1、SS2、SOS、SLS等安全功能, 帮助客户在保证安全生产的同时,还能提升生产效率。
(转载)

