
目前的铝液浇铸工序大多采用助力器加人力的方法,由于铝液浇铸时,温度控制和浇铸量控制是保证铸件质量的重要因素,且人在高温环境中工作的不稳定性,较难控制铝液浇铸的温度,铝液的消耗也很大,因此目前的浇铸设备很难保证铸件的质量。由于上述原因,亟需机器人来实现自动化的舀铝液和浇铸工作。

伺服浇铸装置,可精确控制铝液的浇铸温度和浇铸速度,浇包工作角度也可精确控制并能控制铝液的浇铸量,铝液消耗少;操作人工的劳动强度降低,安全性提高;可连续工作24小时,生产效率高,适应性广。伺服浇铸装置的整个传动系统及伺服马达全部安装有罩壳进行防护,在系统运行时用外部鼓风机给罩壳内吹风进行降温。
目前伺服浇铸装置的传动方式主要有两种,即链轮传动方式和齿轮传动方式。
链轮传动方式具有结构简单、性价比高等优点,但是传动平稳性差、精度偏低,故链轮结构主要应用于缸体缸盖等较大铸件的生产应用中。而对浇铸量要求较高的小型铝合金铸件生产中并不适用,不能满足平稳、准确、定量浇铸的要求,链轮传动方式伺服浇铸装置如图1所示。
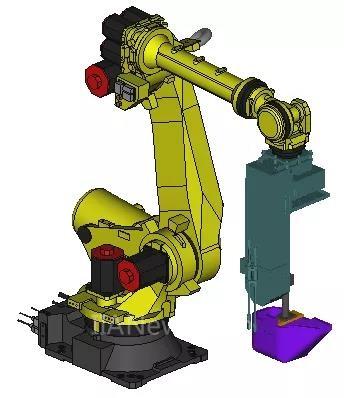
图1 链轮传动方式伺服浇铸装置
齿轮传动方式是用伺服电机经过减速器实现减速后输出转矩到圆锥齿轮传动箱,从而平稳地实现舀铝液及浇铸的动作,舀铝液的精度更高,齿轮传动方式伺服浇铸装置结构如图2所示。

图2 齿轮传动方式伺服浇铸装置
在实际生产过程中,为了实现更好的浇铸效果,生产出质量更好的产品,机器人在浇铸过程中,需要与铸造机协调动作,为了实现这一功能,须利用FANUC伺服电机驱动铸造机。
例如,机器人在向铸造机的浇口中注入铝液过程中,铸造机从模具上平面与水平面成20°角的姿态匀速转动至水平状态,机器人在浇铸的同时需要能够同步跟随铸造机运动,示意图如图3所示。
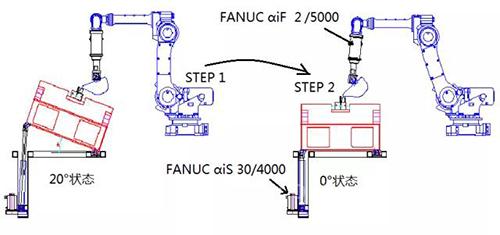
图3 协同浇铸示意图
伺服浇铸装置中的FANUC伺服电机应当集成在Group 1,与机器人一起联动;而铸造机的伺服电机作为一轴变位机,安装在Group 2。铸造机的倾斜动作通过FANUC伺服电机进行驱动,铸造机工作时机器人根据铸造机控制柜给出的信号来驱动伺服电机使铸造机完成倾斜动作。机器人向铸造机中倒铝液时通过用示教器手动示教多点记录运动轨迹来拟合同步跟随铸造机上浇口的运动轨迹。
FANUC开发的机器人全自动化浇铸系统,不仅可以实现机器人自动舀铝液、浇铸,还可实现砂芯上料、去毛刺,取件、淬火、切冒口等全自动化工序。
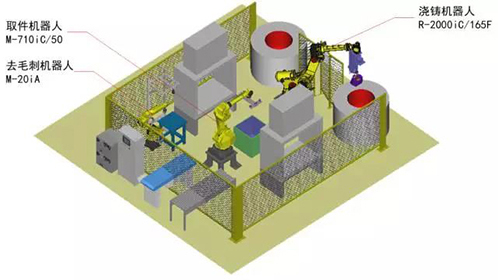
图4 机器人全自动化浇铸系统
FANUC浇铸版机器人表面及空腔内均涂覆了特殊防高温剥落涂层,外露螺栓和垫圈采用防锈材质,机器人马达电机等敏感区域采用特殊的罩壳配合密封垫圈对其进行保护,增强了在恶劣环境中的防尘、防水性能。
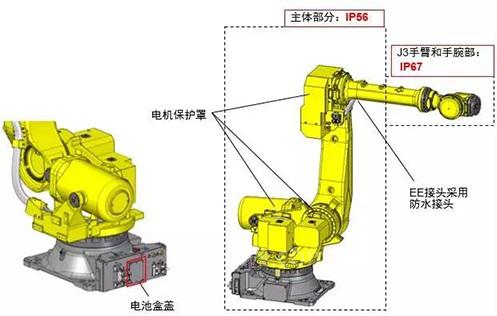
图5 铸造版机器人特性
FANUC机器人应用于重力铸造行业,具有改善劳动条件、提高产品质量、减少设备损耗等特点,可为企业实现清洁生产,增大企业效益。
(转载)

