
小编带大家一起来看看YuMi机器人如何校准!其实,YuMi机器人可以和普通机器人一样校准,通过示教器校准来完成。
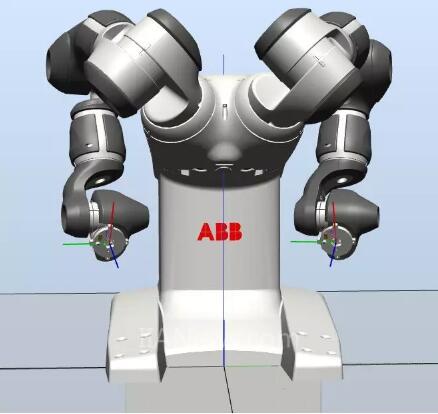
1)校准时,先移动机器人到校准刻度线附近,注意校准位置左右手不对称,对于7轴,左手对准L刻度位置,右手对准R刻度位置。


2)YuMi每个关节内置霍尔传感器,即机器人在校准位置时,霍尔传感器信号为0,其他位置为1,所以可以运行程序自动找校准位置(前提是机器人已经在校准刻度附近)
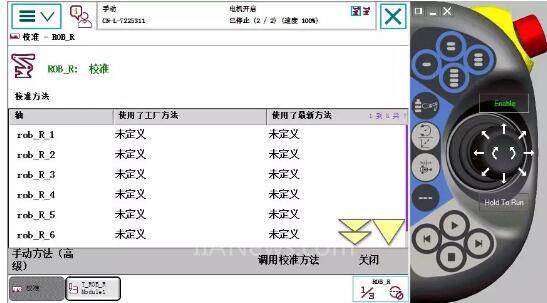
3)示教器-校准-调用校准方法,上电后运行程序
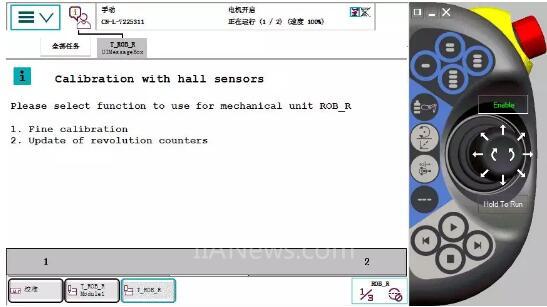
4)选择fine还是更新转数计数器(通常都是更新转数计数器)
5)选择要更新的轴
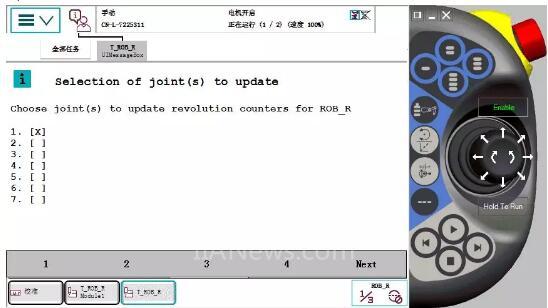
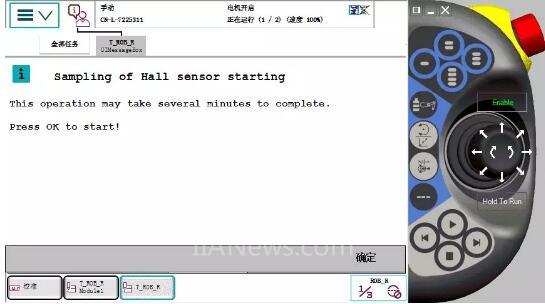
6)选择完毕,开始校准
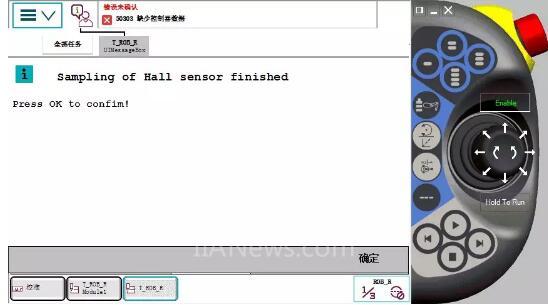
7)校准完毕,给出提示
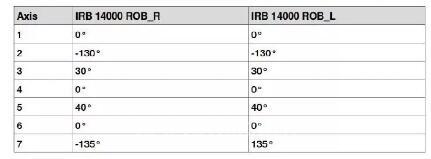
8)校准完毕后,机器人处于校准位置,各轴显示刻度如下
(转载)

