
背景介绍
在汽车车身制造的整个工艺流程中,在油漆车间内的涂胶是一个重要的环节。一般需要在电泳过后的白车身上涂上一层密封胶、水性隔音胶、PVC胶等材料,可以起到防水防腐蚀、隔音降噪等作用,有效地提高了汽车的使用寿命并且提供了舒适的驾乘环境。
目前各个汽车生产厂家的车身涂胶工艺逐渐向机器人自动化作业方向发展,按照流水线生产方式设置多个机器人涂胶工作站,每个站完成不同的涂胶工作,一般每个站的作业流程是:
1 车身被机运系统输送到涂胶工位并停止(此时车身的停止位置存在一定的误差)
2 通过视觉系统对车身的位置进行3D定位
3 机器人进行涂胶作业,在作业的过程中根据车身的位置偏差信息对预先编写好的工艺轨迹进行补偿
4 机器人作业完成后,车身被输送到下一工位
采用FANUC机器人内置的iRVision视觉系统可以完成对车身的3D定位,具有操作方便、可靠性高的优点,本文将做一简单介绍。

iRVision视觉系统介绍
iRVision是FANUC机器人内置的视觉功能。
iRVision = Intelligent Robot Vision
iRVision视觉系统主要由相机、视觉板卡、视觉软件三部分组成,其中视觉板卡和视觉软件都集成在机器人控制柜内。相机可采用FANUC原厂提供的相机,或第三方的以太网接口(gige接口)相机,可直接连接到机器人控制柜。
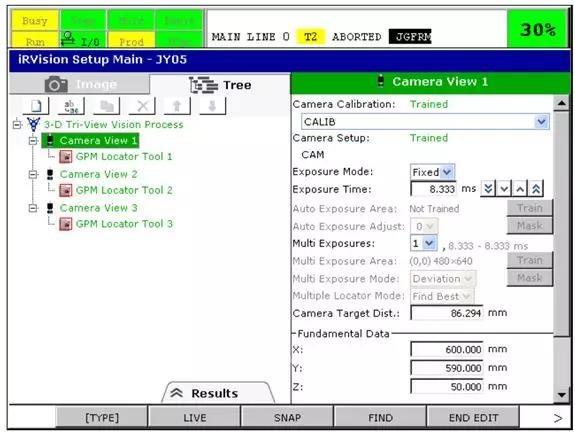
iRVision的示教和操作可在机器人的示教操作盘(Teach Pandant)上进行:

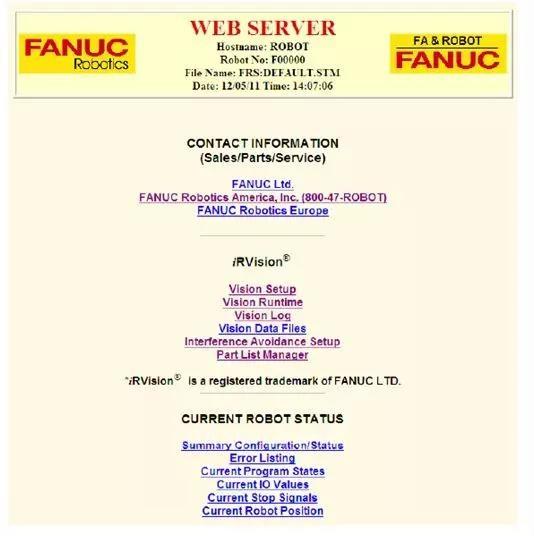
也可以使用一台笔记本电脑,通过一根普通以太网线和IE浏览器连接到机器人控制柜,登陆iRVision界面进行视觉调试或查看运行状态:
iRVision视觉系统多才多艺,可以实现多种功能,例如:
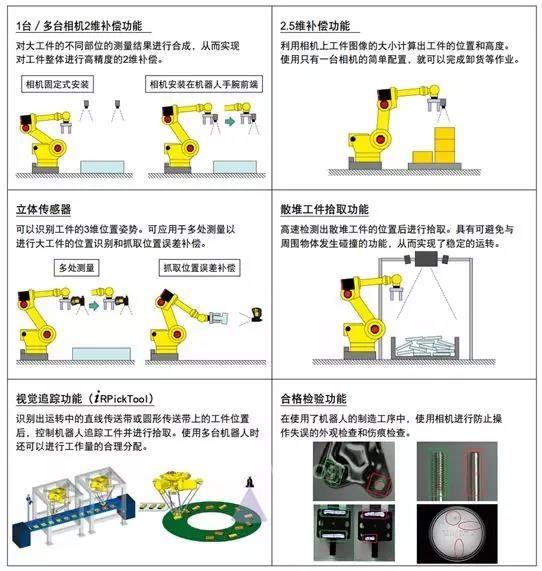
一般根据不同的应用需要选择不同的软件和硬件配置,如视觉软件选项、视觉板卡、相机型号、镜头焦距、光源等。
iRVision视觉系统车身定位原理
iRVision视觉系统通过测量车底的3个工艺孔实现三维补偿,如下图所示:
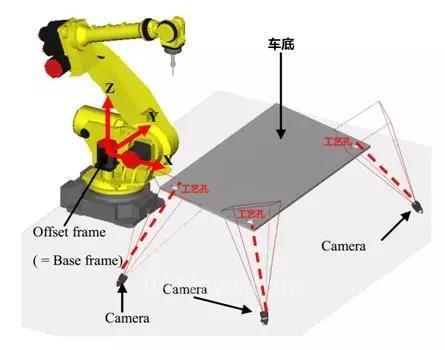
大致的实现过程如下:
1. 在视觉示教阶段:
● 示教一个表示车身空间位置的用户坐标系(User Frame)
● 示教车身底部3个工艺孔的几何特征
● 对上述3个工艺孔进行拍照,计算并保存车身在用户坐标系中的位置,作为基准位置(认为偏差为零)
● 在基准位置时完成机器人涂胶工艺轨迹程序的编写
2. 在实际生产过程中:
● 车身进入涂胶工位并停止后,iRVision视觉系统对车底的3个工艺孔进行拍照,并计算车身在用户坐标系中的实际位置
● 计算车身位置的偏差值 = 实际位置 – 基准位置
● 在涂胶的过程中,机器人根据偏差值对涂胶工艺轨迹程序进行补偿
通常定位时间为2sec,定位精度可达±1mm。
实际应用
在实际应用中,一般还需要考虑以下因素:
● 生产的车型可能有多种,每一种车型的底部工艺孔分布位置不同,因此一般安装4-6台相机,根据车型信息自动选取其中3台相机进行拍照。
● 为每一台相机配备一套安装支架,相机的安装角度和高度可调节。
● 为每一台相机配备一套LED光源,当拍照时进行补光。色从光来,光照因素对拍照结果有重要影响。
● 由于涂胶工位的工作环境一般存在胶的雾化及飞溅污染,因此相机将被安装在一个保护盒内,并且配备镜头防护盖板,由PLC和气缸控制开/合。
● 视觉系统是否需要具备降级模式(Degrade Mode)功能,万一视觉系统发生故障,可自动切换到备用系统完成对车身的定位,生产不会中断。
实际应用的过程一般如下:
1. 在方案阶段,上海发那科工程师根据车型信息、车型数量、仿真和测试结果、是否需要实现降级生产模式等因素制定相应的iRVision视觉系统硬件配置方案,如相机品牌和数量、镜头焦距等。
2. 机器人在FANUC工厂的制造阶段,根据上述配置方案集成iRVision视觉功能。
3. 在涂胶机器人系统的集成阶段,在上海发那科工厂对iRVision视觉系统进行预组装和测试:


4. 最后,上海发那科工程师完成iRVision视觉系统在客户现场的安装与调试,并且对客户人员进行培训。
(转载)

