
非接触式数据传输的工作原理
在一些应用中电缆、连接器和触点会受到巨大压力。而在其它应用中 (例如在活动的机器部件上),固定接线并非理想方案。我们现在为您揭示如何利用非接触式传输系统解决这些挑战。
01、应用示例
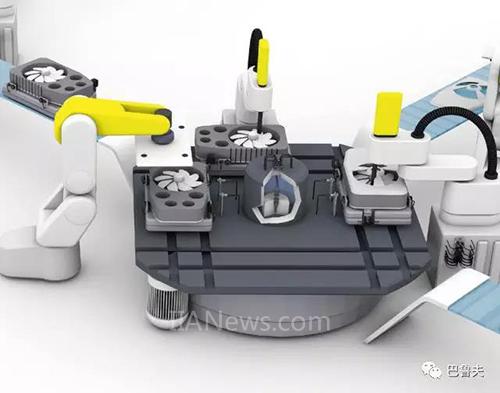
机器人通常需要处理不同工件,则需要不同的抓手,因此必须频繁更换抓手。如果在机械臂和抓手之间使用非接触式传输系统,则可以自动进行这种更换。因为在此过程中不需要插拔连接电缆。

在转台上常常在不同工位上执行不同的工作步骤。通过传感器能探测工件在旋转转台上的正确位置。并借助非接触式传输系统将信号传输到PLC。
02、组件
一个非接触式传输系统由两个组件构成:远程站和基站。远程站安装在应用的移动面上。它通过耦合系统连接传感器和执行器。基础端则安装在应用的固定面上。它将能量传输到远程站,同时接收传感器的状态信息,然后转发到控制系统。根据环境条件,提供不同的结构型式。
03、合适的产品

圆柱形非接触式传输系统(远程站,基站)

立方形非接触式传输系统(远程站,基站)
关于巴鲁夫
在诺伊豪森成立于1921年,作为传感器及自动化专家,这家家族型企业在第四代领导人的带领下提供了全方位的产品系列,包括创新型传感器、工业识别及工业网络的解决方案。除了坐落在诺伊豪森的公司总部外,巴鲁夫的生产及研发基地遍布全球,拥有62个跨国分公司及办事处。这能向客户保证产品在全球范围内的快速供应,同时确保本地支持及服务的高标准。
欢迎拨打全国热线 400 820 0016 进行垂询,我们期待与您的合作。

(转载)

