
FANUC ROBODRILL 换刀动作的检查及调整主要分为两大类的机械调整:
● 主轴定向的检查与调整
● Z轴原点的检查与调整
一.主轴定向的检查与调整
1. 主轴定向的检查:确认主轴端的齿轮钥匙与Y轴平行排列。
2. 主轴定向的调整
调整主轴栅格位移。用千分表将MS齿轮两个固定键调整至一条直线,在10um以内,在系统-诊断0445中观察栅格位移,将MS齿轮有标记一侧对着机台正前方。调整后将0445中的数值同时输入参数NO.4073和NO.4077中,将主轴上升确认齿轮啮合。

二.Z轴原点的检查与调整
1. Z轴原点的检查
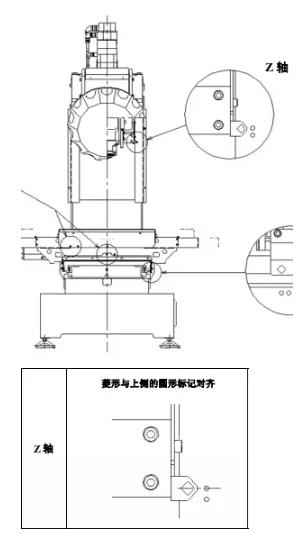
2. Z轴原点的调整
(1)选择手轮方式,用手轮移动Z轴,移动轴一圈以上,关机重启
(2)快捷画面选择,维修/设定画面

(3)选择“电机原点恢复”。按下<2>、<输入>键后,出现如下画面:
(4)利用光标选择待恢复轴。
(5)按软键[执行]。出现如下画面:
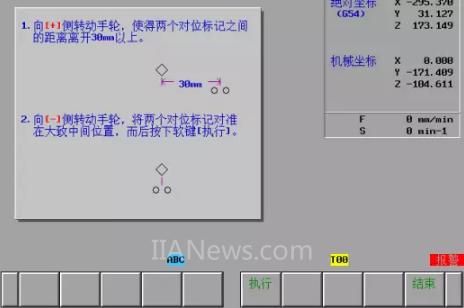
(6)按照提示“1.”,使菱形与圆形的标记离开30mm以上。如果已经离开足够的距离,则不要此项操作。
(7) 按照提示“2.”,选择手轮方式,用手轮使Z轴向(+)方向移动,在菱形进入2个圆形标记之间的状态下,按下软键[执行]。此时,注意不要移动过多,使菱形超出2个圆形标记之间。

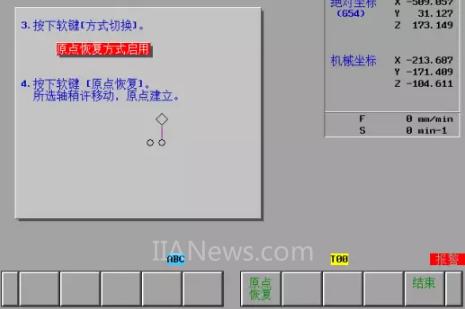
(8) 按照画面上显示的提示“3.”,按下软键[方式切换]键。画面上显示出“原点恢复方式启用”的注释。
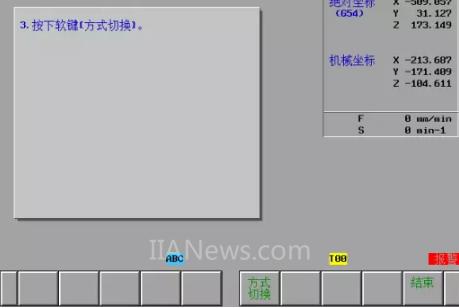
(9) 按照提示“4.”,按下软键[原点恢复]。进行此项操作后,轴稍许移动并建立原点。操作后请确认菱形标记与圆形标记已经对齐。
(转载)

