
近年来,随着工业自动化的快速发展,机器人在工业领域的应用越来越广泛,在搬运、装配等应用中,导轨机器人已成为了一种提高机器人使用率的方式,导轨机器人、单导轨多机器人的使用也越来越广泛。由此也引发了多台机器人在同一导轨上工作时的安全性问题,当前常用的解决方案是多机器人之间通过空间位置、逻辑关系判断来解决,但是,这样还是不能完全解决多机器人之间可能产生的干涉问题。针对这样的难题,FANUC开发了多机器人导轨干涉检测功能,可以很好地解决该问题。

使用本功能,机器人之间需要建立通讯联系,并调整机器人的系统设置,在已经预设好的条件下,导轨上各台机器人可根据当前实时位置来判断机器人之间是否存在干涉情况。该功能需要添加软件(Intelligent Interference Check)。
通过机器人的示教器设置界面(Menu-SETUP-RailZone setup),可对机器人和空间进行设置:

设置过程中需要判断机器人的左右位置,具体判断方式如下:

在这个示意图中R3 有最高的导轨位置,即R3左侧是R2;R2左侧是R1。

而在这个示意图中R1有最高的导轨位置,即R1左侧是R2;R2左侧是R3。
设置完成后,可以通过状态栏对当前机器人的状态进行查看。
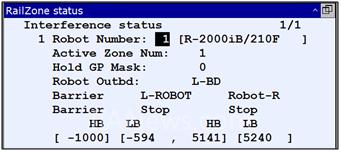
在上图中,我们可以查看当前机器人的状态、实时位置以及相邻位置机器人的位置等信息。从而保证同一导轨上多台机器人都不会产生碰撞干涉。
通过FANUC ROBOGUIDE仿真软件,我们可以更加直观的查看机器人未干涉和干涉时的不同状态,如下图所示:
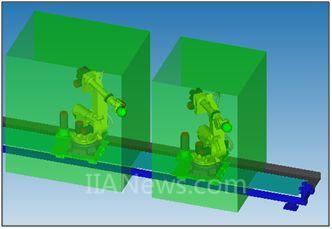
未干涉时状态
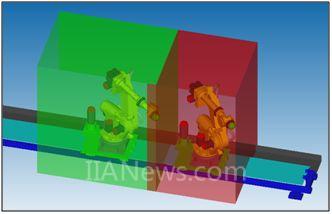
干涉时状态
另外,将多机器人导轨干涉检测和Dual Check Safety功能结合,还有更丰富的使用方式。通过构建机器人的末端执行器模型,也可以实现实时检测机器人末端执行器在运动过程中的状态。
(转载)

