
近年来,随着中国汽车产业的消费增长和人工成本的不断上升,如何提高整车生产合格率并降低成本,是众多汽车制造厂家重点关注的问题。目前,大部分整车生产线的车身外表面喷涂工艺都已实现完全机器人自动化喷涂,车身内表面喷涂由人工作业改造为自动化喷涂自然成为了新的发展趋势。FANUC作为世界领先的机器人厂商,拥有着已经广泛成熟应用的车身内表面喷涂系统。
标准的车身内表面喷涂系统,由4台喷涂机器人、4台开门机器人和2台开盖机器人组成。过程中,由开门/开盖机器人将引擎盖、车门、尾门等开启,喷涂机器人完成内表面喷涂作业,最后再由开门/开盖机器人将引擎盖、车门、尾门等关闭。整套内表面喷涂系统工作空间紧凑,机器人之间通过Wait/Release功能进行通讯交互,使得一套系统内的机器人可以协同工作,安全、高效的完成复杂的喷涂作业。
下文主要介绍FANUC Wait/Release功能:
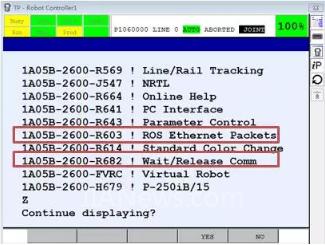
1)首先,机器人系统中需要安装Wait/Release Comm和ROS Ethernet Packets功能选项。
2)在机器人系统菜单[MENU] → SETUP → Wait/Release 中进行设置。
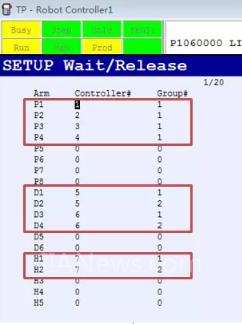
(图中 P:代表喷涂机器人; D:代表开门机器人; H:代表开盖机器人; Controller#:代表控制柜编号; Group#:代表运动组编号)
P1,P2,P3,P4分别由一个控制柜控制,每个控制柜均只控制一个运动组;
D1,D2和D3,D4分别由一个控制柜控制,分别对应运动组1和2;
H1,H2由一个控制柜控制,分别对应运动组1和2。
请注意:每一台控制柜的Wait/Release功能都需要设置并保持一致。
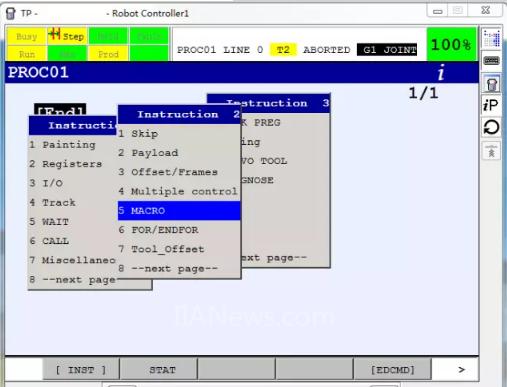
3)在编程界面使用Wait/Release 功能语句。
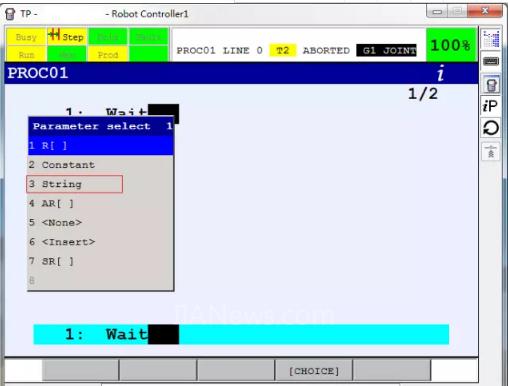
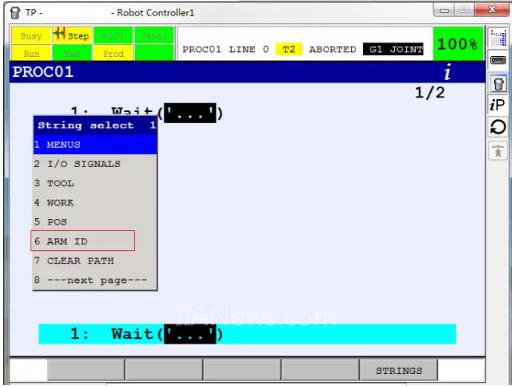
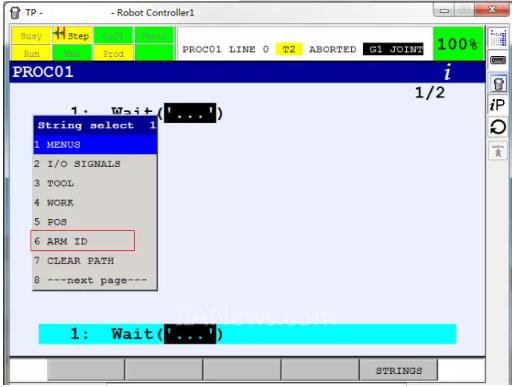
如下图,编程界面→ F1‘INST’ → 5‘MACRO’→选择Wait或Release →3‘String’→6‘ARM ID’ 选择需要控制的机器人。
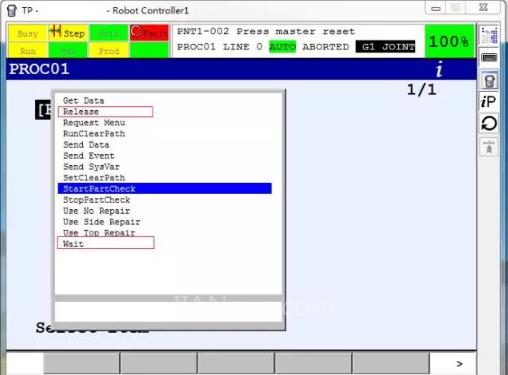
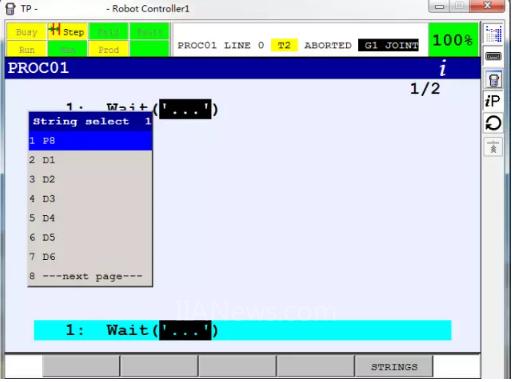
这样,我们就可以使用Wait/Release语句进行程序编程了。
以下为喷涂机器人和开门机器人之间的逻辑互锁示例:

上述表格中描述了P1喷涂机器人和D1开门机器人之间的简单交互:
P1机器人首先运行到需要喷涂的车门附近、等待D1机器人将车门打开。D1机器人完成车门开启后,发送Release信号给P1机器人,P1机器人开始进行车门内表面的喷涂,过程中D1机器人保持车门开启,等待P1机器人喷涂完成。P1机器人喷涂完成后离开车门区域并同时发送Release信号给D1机器人,D1机器人将车门关闭。
实际上,对于整车生产线上的车身内表面自动化喷涂系统,机器人之间的互锁通讯会更加复杂,需要编程者保持清醒的头脑,理清工作逻辑。Wait/Release的功能正是FANUC基于此开发出的人性化功能,帮助我们的客户更加简单、高效的完成复杂系统的编程工作。
(转载)

