
加拿大的Bombardier运输公司正在为拉斯维加斯设计一种新的运输系统。它是一种无人驾驶的单轨车辆。该车带有四个车厢,这四个车厢可以始终连接在一起。车厢的编号分别为A、B、C1和C2,以示区分。A和B车厢是两个头(尾)车, C1和C2则是中间车厢。在未来的项目中,可以添加更多中间车厢。在标准模式下,车厢受控于带有备用冗余功能的车载控制器(VOBC)。第二个车载控制器位于B 车厢。如果主车载控制器出现故障,B车厢的车载控制器就会接管车厢的控制功能。车载控制器通过无线方式与控制中心相连。控制中心负责在整个线路上进行整体控制。
现在为拉斯维加斯建造的车辆一共有9辆,其中8辆随时提供公共运输服务。
我们的服务
● 工程
○ CAN网络技术规范
○ 定义网络体系
○ 可变技术规范
○ 确定网络管理功能
○ 确定接口
○ 创建网络模拟功能
○ 通过触控屏显示状态
● 培训
● 提供硬件
● 启动支持
● 文件记录
总线连接
各个车厢通过列车总线连接起来。在车厢中的车辆总线把各个设备彼此连接起来,比如牵引设备、制动设备和空调设备等。Bombardier决定使用CAN 现场总线作为列车总线和车辆总线。

网络结构
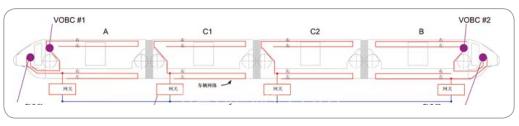
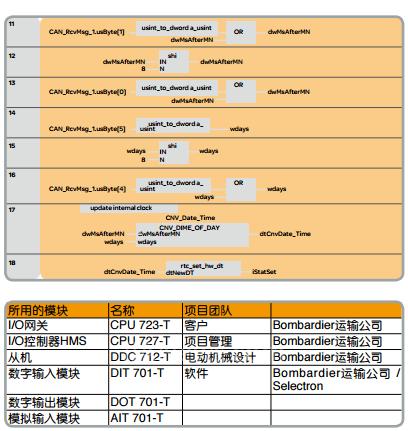
这个网络结构中包括5个物理CAN网络。这5个网络通过网关连接在同一个逻辑网络中。 CAN网络中的协议为CANopen Bombardier决定使用MAS-T模块管理网络和网关功能,并寄存数字和模拟I/ O信号。在维护过程中,可以通过手动方式控制车辆。前方有一个触摸屏,用来完成手动操作。此外还可以通过MAS控制器以手动方式控制车辆。触控屏由现有的RS-232控制。
(转载)

