
TCP 对于机器人来说是十分重要的,它的准确性决定了机器人轨迹的准确与任务的完成率。那么如何正确快速的定义一个安装有ABB雾化器的机器人工作TCP 呢?我们可以通过ABB 雾化器标准技术文档的阅读来找到答案。
首先,在您的随机光盘里找到用户文档的主界面。

其次在雾化器章节中找到您使用的ABB 雾化器的具体型号的服务文档(如RB1000-SSD/SAD)的规格描述部分,可以根据实际不同的喷涂距离确定所要设定的TCP 的坐标。
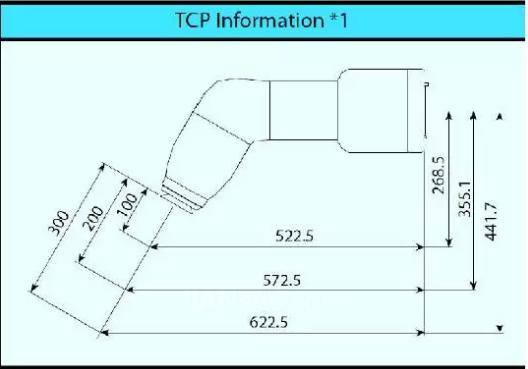
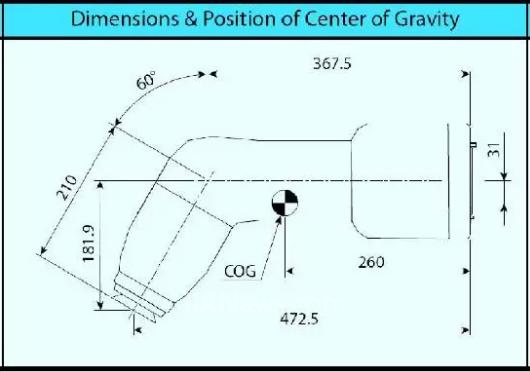
然后找到规格描述中关于中心和TCP 姿态的相关信息(如RB1000-SSD/SAD)。
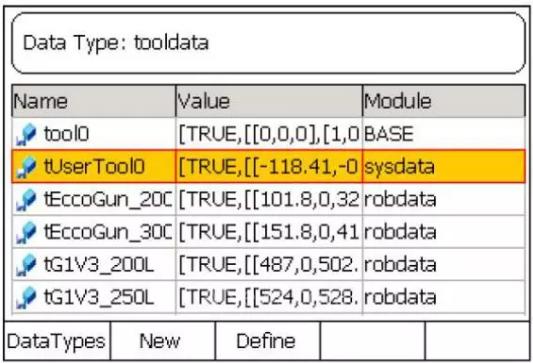
最后在工具数据里将所收集的信息输入相应项目中。
(转载)

