
KUKA Roboter GmbH 提供的 mxAutomation 功能包方便用户使用 SIMATIC 控制器,用 KR C4 控制器中的基本命令和运动命令控制 KUKA 机器人。本应用示例介绍了如何使用 SIMATIC S7-1516 控制机器人,并概要介绍了所含功能块的用法。
工业机器人越来越受欢迎。目前,这类机器人在机器和工厂中的应用越来越广泛。其标准化机械系统经过全面开发,并在运动控制方面高度灵活,因此成为了昂贵的专用机械设备的理想选择。因此无需对机器和工厂进行昂贵的改装即可实现大批量生产。
不过,工厂控制系统和机器人控制器是两种截然不同的系统。这两种控制器之间的通信通常只能以位级别进行,而且机器人的运动控制程序永久存储在机器人控制器中,工厂控制系统不能从中调用。因此,机器人难以对特殊工厂事件做出灵活响应。另外,工厂控制系统和机器人的编程完全不同,因此这两个系统基本不能由同一个人提供支持。因此,接口和协调问题不可避免。
本应用示例介绍如何使用 SIMATIC S7-1500 控制器来全面操控 KUKA 工业机器人。为此,可在 TIA Portal 中使用 mxAutomation 模块库,其中提供了全部必要的功能块。
SIMATIC S7-1500 控制器和 KUKA 工业机器人通过 PROFINET 连接进行通信。SIMATIC 控制器和机器人通过此连接完成所有命令和状态信息交换。
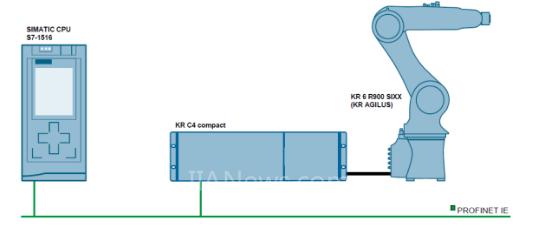
图 01
SIMATIC 控制器使用 mxAutomation 模块库全面控制 KUKA 工业机器人。KUKA 工业机器人包含 KUKA KR C4 机器人控制器和机器人的机械系统,实体机器人。 mxAutomation 模块库命令的解码器安装在机器人控制器上。该解码器接收来自 SIMATIC 控制器的命令,并在机器人的机械系统上执行,包括运动转换。
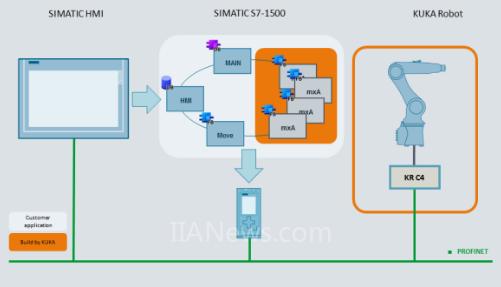
图 02
(转载)

