
接触跳转功能,即Touch Skip Function。此功能是一个选项功能,和标准功能中的Skip Condition指令不同。标准功能中的Skip Condition指令,是在编程时设定一个条件,当机器人运动过程中满足这个条件时,会立刻跳转到程序其它行。而Touch Skip Function,用于监控任意多个轴的扰动扭矩,当任意轴的扰动超过了设置的阈值时,就会执行高速的跳转。使用此功能,可以避免机器人在位置干涉时出现碰撞报警,以保持运动的连续性。
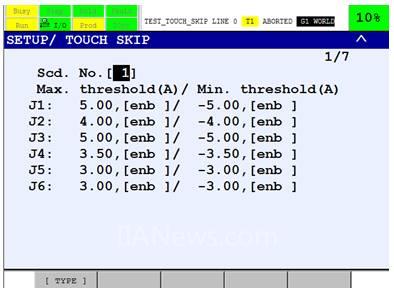
当设置Touch Skip功能时,“SETUP/TOUCH SKIP”界面将会显示;使用该功能时,能够调用接触跳转子程序。
注意:当使用Touch Skip功能时,系统变量$MISC_MSTR.$HPD_ENB必须为TRUE(默认值为FALSE);如果$MISC_MSTR.$HPD_ENB不为TRUE,请设置为TURE,并重启。
● 在“.”中输出一个值,可改变条件的编号
● 针对每一个轴的扰动,可设置最大值、最小值和enable/disable
在上图中的设置中,J4轴的扰动最大值为3.50[A],J5轴的扰动最大值为3.00[A]。也就是说,当机器人J4轴在运动过程中扰动扭矩达到3.50A时,触发Touch Skip条件,从而发生程序跳转,跳至后续程序的某一行,并中止当前运动指令。
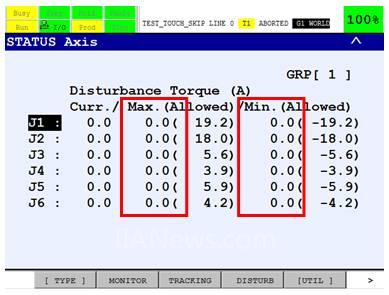
进入STATUS-AXIS-DISTURBANCE界面,可观察扰动状态(如下图)。观察机器人运动过程中各轴扰动扭矩的最大值或最小值,并作为参考,来设置TOUCH SKIP界面设置合适的扰动值最大值或最小值(即阈值)。
在TP程序中,Touch Skip的使用方法可以参考下面的例子:
1: CALL SETSKCOL(1,1) ;
2: CALL CLSKP_G1 ;
3: L P[1] 20mm/sec FINE ;
4: L P[2] 20mm/sec FINE Skip,LBL[1],PR[1]=LPOS ;
5: MESSAGE[TOUCH] ;
6: END ;
7: LBL[1] ;
8: MESSAGE[NO TOUCH] ;
9: END ;
其中,子程序SETSKCOL的参数含义为群组1内各轴的扰动阈值设置了条件编号[1];子程序CLSKP_G1包含了跳转条件为 “群组[1]的任意轴上扰动超过了阈值”。 程序第4行中带有高速跳转指令的运动,当触发了SKIP条件后,执行下一行(第5行),并将当前位置存入PR[1]。当没有满足跳转条件时,执行跳跃到标签LBL[1],执行第7行。例如,当运程序第4行的过程中,机器人与外围设备发生了接触,且J4轴扰动扭矩值达到了上限,机器人就不会完成第4行的运动指令,实现接触跳转。
使用此功能后,在可能存在干涉的环境下,可有效地避免机器人与外围设备的碰撞,达到保护机器人和外围设备的目的,保证生产安全。
(转载)

