
六点示教法包括六点(XY)示教法、和六点(XZ)示教法。
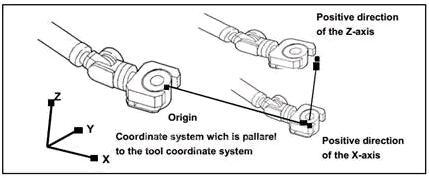
六点(XZ)示教法中,取一个方向原点、一个与所需工具坐标系平行的X轴方向点、一个XZ平面上的点。此时,通过笛卡尔点动或工具点动进行示教,以使工具的倾斜保持不变。
步骤:
1.按下 [MENU] (菜单)键,显示出画面菜单。
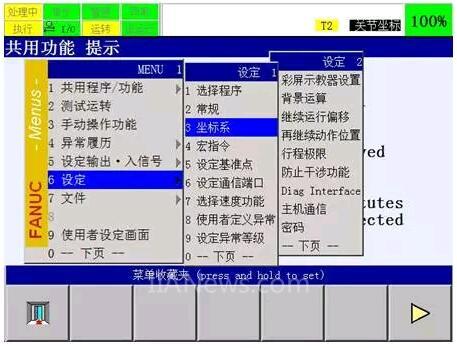
2.选择“ 设定 ”,光标右移选择 “ 坐标系 ”。出现工具坐标系一览画面。
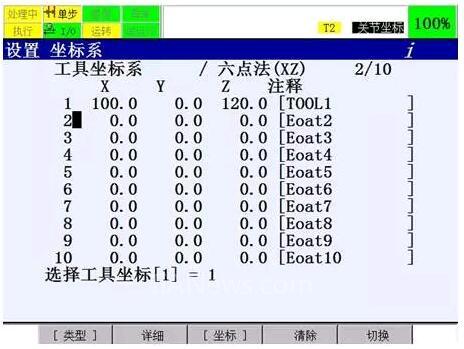
3.将光标指向将要设定的工具坐标系号码所在行。
4.按下F2“详细”。出现所选的坐标系号码的工具坐标系设定画面。
5.按下F2“方法”。
6.选择“六点法(XZ)”。

7.输入注释
a 将光标移动到注释行,按下ENTER(输入)键。
b 选择使用单词、英文字母。
c 按下适当的功能键,输入注释。
d 注释输入完后,按下 ENTER 键。

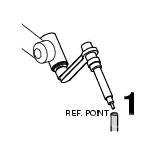
8.记录各参照点。
此处以如下姿势为例:
1)记录接近点1:
a.移动光标到接近点1(Approach point 1);
b.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
c.按【SHIFT】+ F5【RECORD】(位置记录)记录。
2)记录接近点2:
a.沿全局坐标(WORLD)+Z方向移动机器人50mm左右;
b.移动光标到接近点2(Approach point 2);
c.把示教坐标切换成关节坐标(JOINT),旋转J6轴(法兰面)至少90度,不要超过180度;
d.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到准点;
e.按【SHIFT】+ F5【RECORD】(位置记录)记录;
f.沿全局坐标(WORLD)的+Z方向移动机器人50mm左右;

3)记录接近点3:
a.移动光标到接近点3(Approach point 3);
b.把示教坐标切换成关节坐标(JOINT),旋转J4轴和J5轴,不要超过90度;
c.把示教坐标切换成全局坐标(WORLD),移动机器人,使工具尖端接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
e.沿全局坐标(WORLD)的+Z方向移动机器人50mm左右;

4)记录Orient Origin Point(方向原点)
a.将机器人姿态示教至工具的两个特征方向与全局坐标(WORLD)的两个方向平行。
b.移动光标到方向原点(Orient Origin Point);
c.按【SHIFT】+F5【RECORD】(位置记录)记录;
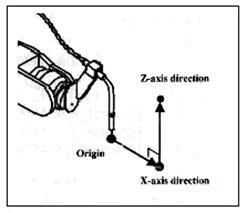
5)定义+X方向点:
a.移动光标到X方向点(X Direction Point);
b.把示教坐标切换成全局坐标(WORLD);
c.移动机器人,使工具沿所需要设定的+X方向至少移动250mm;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
6)定义+Z方向点:
a.移动光标到方向原点(Orient Origin Point);
b.按【SHIFT】+F4【MOVE_TO】(位置移动)使机器人恢复到Orient Origin Point(方向原点);
c.移动光标到Z方向点(Z Direction Point);
d.移动机器人,使工具沿所需要设定的+Z方向(以全局坐标(WORLD)方式)至少移动 250mm;
e.按【SHIFT】+F5【RECORD】(位置记录)记录;
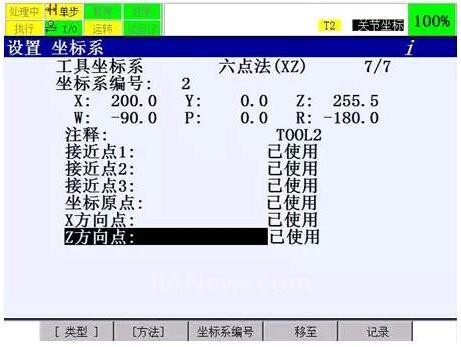
9.对所有参考点都进行示教后,显示“已使用”。工具坐标系即被设定。
10.再按住SHIFT键的同时按下F4“移至”,即可使机器人移动到所记录的点。
11.要确认已记录的各点的位置数据,可以将光标指向各参考点,按下ENTER键来查看各点的详细位置数据。要返回原先的画面,按下PREV(返回)键。
12.按下PREV(返回)键,显示工具坐标系一览画面。可以确认所有工具坐标系的设定值。
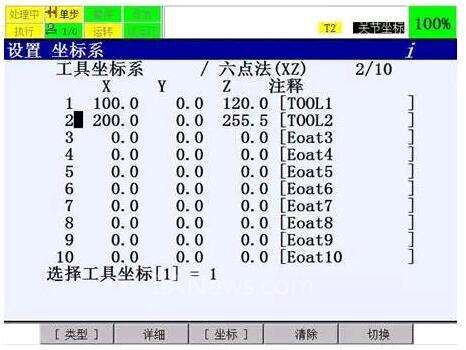
13.要将所设定的工具坐标系作为当前有效的工具坐标系来使用,按下F5 “切换”,并输入坐标系号码。
注意:
若不按下 F5 “切换”,所设定的坐标系就不会有效。也可以使用SHIFT + COORD来选择需要使用的坐标系号码。
14.要清除所设定的坐标系数据,按下F4 “清除”。
(转载)

