
1、机器人技术入门 什么是机器人? 机器人 Roboter 这个概念源于斯拉夫语中的字 robota,意为重活。
工业机器人这个词的官方定义为: “ 机器人是一种可自由编程并受程序控制的操作机。” 控制系统、操作设备以及连接电缆和软件也同样属于机器人的范畴。

工业机器人
1 控制系统(控制柜 (V)KR C4)
2 机械手(机器人机械系统)
3 手持操作和编程器(库卡 smartPAD)
所有不包括在工业机器人系统内的设备被称为外围设备,它们是:
● 工具(效应器/Tool)
● 保护装置
● 皮带输送机
● 传感器
● 等等
2、 库卡机器人的机械系统
什么是机械手? 机械手是机器人机械系统主体。 它由众多活动的、相互连接在一起的关节(轴)组成。 我们也称之为运动链。
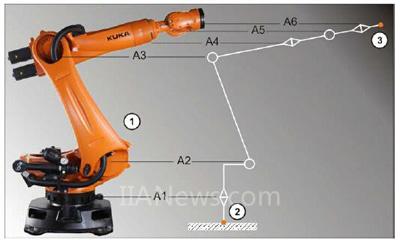
工业机器人机械手
1 机械手(机器人机械系统)
2 运动链的起点: 机器人足部 (ROBROOT)
3 运动链的开放端: 法兰 (FLANGE)
A1
...
A6
机器人轴 1 至 6
各根轴的运动通过伺服电机有针对性的调控而实现。这些伺服电机通过减速器与机械手的各部件相连。
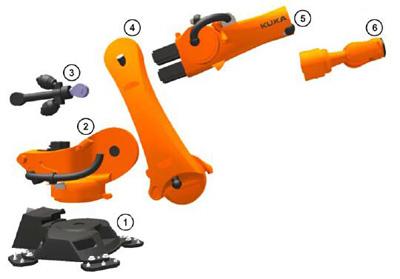
机器人的机械零部件概览
1 底座4 连杆臂
2 转盘5 手臂
3 平衡配重6 手
机器人机械系统的部件主要由铸铝和铸钢制成。 在个别情况下也使用碳纤维部件。
各根轴从下(机器人的足部)到上(机器人法兰)编号:

库卡机器人自由度
以下是库卡产品系列中机械手的技术数据选摘
● 轴数: 4 (SCARA 机器人和平行四边形机器人)至 6 (标准垂直折臂机器人)
● 作用范围: 从 0.35m (KR 5 scara) 直至 3.9 m (KR 120 R3900 ultra K)
● 自重: 从 20 kg 直至 4700 kg
● 精确度: 0.015 mm 至 0.2 mm 重复精度。
基本轴 A 1 至 A 3 以及机器人手轴 A5 的轴范围均由带缓冲器的机械终端止挡限定。
(转载)

