
In-Sight 视觉系统在淄博市临淄银河高技术开发有限公司机器视觉领域的卓越表现。
1.原有方案存在的问题
作业对象: 陶瓷覆铜板
原有解决方案:人工&普通机器视觉系统
存在问题:效率低下&相机与机器人之间不能直接通讯
解读:由人工把陶瓷覆铜板放置在铁网输送线上,流入高温加热设备之后再流出。“这个时候工件有一定温度,在高温加热设备的出口处,由人工来抓取,之后放置在临近工位的物料盒中。”临淄银河公司的生产工程师介绍说,“每个陶瓷板之间再人工放置一张白色隔层纸,结束后再返回加热设备出口处,等待下一个工件。”
这样的生产方式导致生产效率很慢,要耗用2~3个人不间断生产。再加上工件本身有一定温度,人工操作时需要戴上特制手套,因此工件放置在物料盒中也不是很整齐。在陶瓷板分割工序,还要增加一个人对物料盒中的众多陶瓷板进行整理。
于是,临淄银河公司决定进行设备改造,提升生产自动化,引入机器人完成自动抓取。
但是,之前用过其它品牌的视觉系统,效果不太好,相机与机器人之间不能直接通讯,另外,生产现场对视觉检测有着特殊要求,陶瓷板存在高低、倾斜差异,铁网链条处于一直运动中,加上链条本身有高有低,陶瓷板到位后光电提供触发信号不是很准确,也就无法准确触发相机拍照,相机的触发方式相比于以往有时改变,这对视觉系统提出了一些挑战。
2.康耐视的的解决方案
作业对象: 陶瓷覆铜板
解决方案:康耐视In-Sight 视觉系统
全新效果:抓取合格率可达99.8%以上,节省人力成本
解读:配合相机调试时,工件来料随意放置,相机依然可以准确检测出工件的中心位置,引导机器人正确抓取,因为康耐视相机与机器人KEBA系统可以直接通讯,这样接收相机的坐标数据就方便多了。
康耐视强大的PatMax工具可以轻松应对陶瓷板的查找,即使陶瓷板覆铜区域颜色有一定差异,甚至陶瓷板本身大小有一定的变化,PatMax工具依然可以准确定位;先使用PatMax查找陶瓷板进行初定位,之后在陶瓷板四周使用Findline工具,四个Findline找到的边向工件中心进行偏移,交点即为工件的中心点。以某一边的角度变化来反映陶瓷板的旋转角度。这样,对于工件因高低不平发生的倾斜,视觉查找计算的中心点也依然是工件的正中心点。
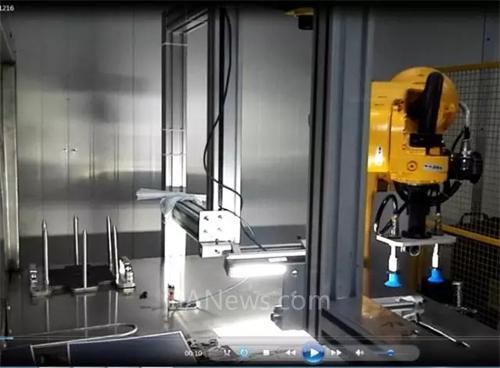
▲ In-Sight 7200-11相机固定安装,两个条光侧打,陶瓷板视觉引导检测,之后将X、Y、Angle值发送给机器人。

▲ 机器人抓取工件时状态图,两个吸盘。
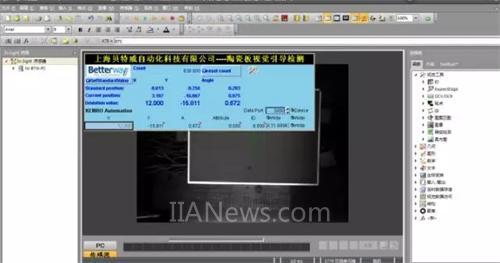
▲ In-sight软件程序界面-自定义视图,按客户要求,显示主要信息。
【总结】
临淄银河公司的DBC陶瓷覆铜板应用In-Sight视觉系统和机器人之后,不但节省了3~4位生产工人,提高了生产速度,而且可以同时兼容多种工件生产。即使工件温度有点高时,也可以直接抓取放置到物料盒中。“视觉技术配合机器人的使用,提高了生产自动化水平和生产效率,保证了产品质量,节约了公司人资成本,”临淄银河公司的生产工程师最后总结道。
(转载)

