
(1)按照被控对象的特性选择控制器
在使用模拟控制器时,由于各行业应用对象的特性是不相同的,如对象很敏感,或被控流量常是脉动状态时,就不应再用微分功能了,否则会使脉动信号的变化加剧。再就是间歇或断续生产的控制过程有其特殊性。所以控制器选型是个较复杂的问题,通常要求按照被控对象的特性来选择控制器。对于有经验的仪表工大多是按照自己的实践经验来确定控制器的选择。而且PID控制器是用得最多的,因为它可以解决大部分的控制问题。表1表示最普遍的控制器选择方法。
表1
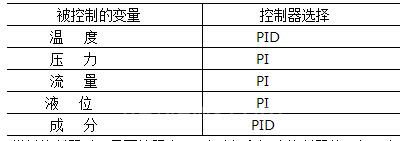
在使用模拟控制器时,是要按照表1来选择和订购控制器的。但现在大量使用的数字回路控制器,使控制器的选择问题简单化了,因为数字控制器的PID功能是以软件的形式出现,这对用户是相当方便的,就是工艺有了改变或变化,对控制系统有新的要求时,也可以很快的通过编程、组态来满足生产对控制的要求。
(2)选择好控制器的正反作用
模拟控制器的正反作用是通过它的正/反作用开关位置来确定的。而数字控制器既有通过正/反作用开关位置来确定的,也有用软件通过设定来选择的。控制器的正反作用是相对于被控制变量而言的,控制器的正反作用是在纯比例状态下来进行判断的。如果输入控制器的被控变量增加,控制器的输出也增加,我们称控制器处于正作用状态;如果输入控制器的被控变量增加,控制器的输出反而减少,则我们称控制器处于反作用状态。正/反作用开关如何设置才正确呢?判断的依据就是看整个控制系统是否是负反馈系统。任何一个闭环控制系统都是由变送器、控制器、调节阀门、被控对象四个环节组成的,因此判断控制器的正反作用应从这四个环节放大系数的连乘积为负来进行判断。
(3)不要忽视手动自动开关的切换工作
在控制系统启动时,应注意将控制系统置于手动位置,通过手操使控制器的有较大的输出,以使被控参数的测量值能较快的向给定值靠近。当测量值接近和达到给定值前,应缓慢调整手动信号以防止超调出现,当测量值等于给定值时,才能从手动位置切换至自动位置。这样控制器的输出才不会突变,也才能平稳的进入PID控制状态。
(4)认真做好控制器的参数整定
控制系统能否稳定的处于自动运行状态,与控制器的PID参数整定具有重要的关系。对于参数整定可参考相关资料。
(转载)

