
PID调节器参数整定方法很多,常见的工程整定方法有临界比例度法、衰减曲线法和经验法。下面以图文形式分别介绍调节器参数整定方法。
临界比例度法
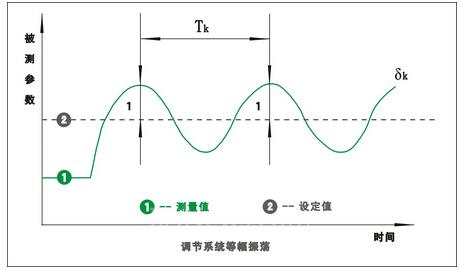
一个调节系统,在阶跃干扰作用下,出现既不发散也不衰减的等幅震荡过程,此过程成为等幅振荡过程,如下图所示。此时调节器的比例度为临界比例度δk,被调参数的工作周期为为临界周期Tk。
临界比例度法整定PID参数步骤
1、将调节器积分时间设定为无穷大、微分时间设定为零(即Ti=∞,Td=0),比例度适当取值,调节系统按纯比例作用投入。稳定后,适当减小比例度,在外界干扰作用下,观察过程变化情况,寻取系统等幅振荡临界状态,得到临界参数。
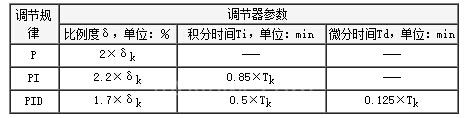
2、根据临界比例度δk和为临界周期Tk,按下表计算出调节器参数整定值
临界比例度法PID参数整定经验公式
3、将计算所得的调节器参数输入调节器后再次运行调节系统,观察过程变化情况。多数情况下系统均能稳定运行状态,如果还未达到理想控制状态,进需要对参数微调即可。
衰减曲线法
衰减曲线法整定调节器参数通常会按照4:1和10:1两种衰减方式进行,两种方法操作步骤相同,但分别适用于不同工况的调节器参数整定。
4:1衰减曲线法整定调节器参数
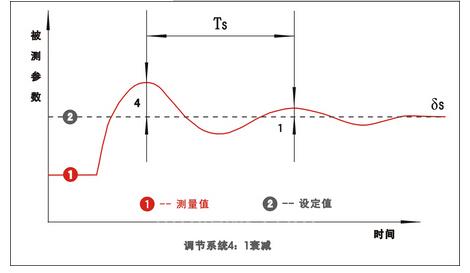
纯比例度作用下的自动调节系统,在比例度逐渐减小时,出现4:1衰减振荡过程,此时比例度为4:1衰减比例度δs,两个相邻同向波峰之间的距离为4:1衰减操作周期TS,如下图所示
4:1衰减曲线法整定PID参数步骤如下:
1、将调节器积分时间设定为无穷大、微分时间设定为零(即Ti=∞,Td=0),比例度适当取值,调节系统按纯比例作用投入。系统稳定后,逐步减小比例度,根据工艺操作的许可程度加2%-3%的干扰,观察调节过程变化情况,直到调节过程变化达到规定的4:1衰减比为止,得到4:1衰减情况下的比例度δs和衰减操作周期TS。
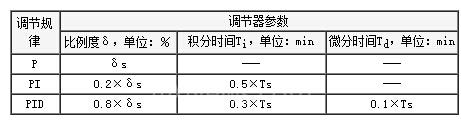
2、根据δs和Ts值按以下公式计算出调节器整定参数
4:1衰减曲线法PID参数整定经验公式
3、将比例度放在比计算值略大的数值上,逐步引入积分和微分作用。
4、将比例度降至计算值上,观察运行,适当调整。
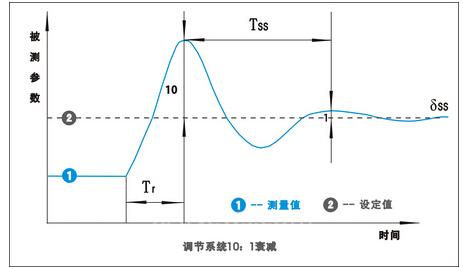
10:1衰减曲线法整定调节器参数
在部分调节系统中,由于采用4:1衰减比仍嫌振荡比较厉害,则可采用10:1的衰减过程,如下图所示。这种情况下由于衰减太快,要测量操作周期比较困难,但可测取从施加干扰开始至第一个波峰飞升时间Tr。
10:1衰减曲线法整定调节参数步骤和4:1衰减曲线法完全一致,仅采用的整定参数和经验公式不同。
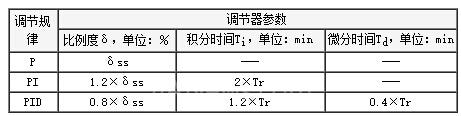
10:1衰减曲线法PID参数整定经验公式
(转载)

