
采用传统的全自动仓储和检索设备的高架仓库应用非常广泛,且技术已经很成熟。然而,和待移动的总质量相比有效载荷却非常小。在由德国联邦教育与研究部(BMBF)、杜伊斯堡-埃森综合大学中的研究机构“鲁尔物流效益集群”共同发起的一个项目中,在绳牵引并联机器人的帮助下消除了这种不一致的现象。这样,他们从基于 PC 的控制技术中所具备的经济性和灵活性中获得了很大收益。此外,Matlab ® /Simulink ® 模型中包含的科学知识可以通过 TwinCAT 3 软件以最简便的方式集成到控制器中。
全自动仓储和检索设备(SRM)现在也可应用于内部物流领域。通过导轨安装的驱动装置和一个举升装置将一台仓储/检索设备放置在高架前面,它将货物放进仓库或将货物再次有的放矢地移出。在这一过程中,当前的 SRM 要移动 1 到 2 吨重的驱动装置、桅杆和举升装置才能传输载重仅为 20 到 50 公斤的小部件。为了避免这一现象,一个集成有仓储/检索设备的轻型平台现在代替了整个驱动和举升装置。这一平台在一个高架前移动,即采用 8 根张紧绳索的绳牵引机器人。结果就是能够建造出各种尺寸机械结构简单且重量极轻的系统,在与质量相关的高度方面没有限制,而传统的高架仓库则需要注意这一高度限制。
新的方案大大降低能耗,提升性能潜力
绳牵引机器人技术的重量大大减轻,与传统的技术相比,重量减轻了有超过 90%,从而在显著提升性能的同时还保持了良好的能量平衡。该方案于 2012 年在杜伊斯堡 — 埃森大学实施,原型高为 6 米,宽 12米,深 1 米。它由机电一体化和运输系统/物流这两个系以及计算机应用设计系共同实施完成。机电一体化系的 Dr. Tobias Bruckmann 总结道:“我们极大地提高了质量比,因为待移动的终端执行机构 — 带有仓储/检索设备的轻型平台 — 仅重 80 公斤,且能够承重载重为 20公斤的物体。与传统的仓储和检索设备相比,以简单的计算和理想的假设为基础的模型计算节约了约 70 % 的能耗。”
在有关可以达到的仓储/检索性能的方面,同样也有很高的优化潜力。典型的 SRM 值,即平台速度为 6 m/s,平台加速度为 5 m/s 2 ,被视作为项目开始时的设计规范。同样来自机电一体化系的 Christian Sturm 补充说道:“需要一个额定功率为 7 kW 的绞盘驱动装置来实现这些值。在我们的样机中,甚至使用了额定功率高达 14 kW 的驱动装置,从而能够显著提升速度和加速度,因为性能更高且载重更大的驱动装置无需像在传统的仓储和检索设备中那样需要移动,因此它们的大质量不会带来任何不利影响。”
以高性能、符合工业标准的控制技术作为基础
若要确保一个系统能够随时随地安全运行,对控制系统的要求极高。除此之外,必须同时驱动 8 个伺服驱动器,并同时读取用于所有 8 根电缆的力传感器和角编码器。这些测得的值为一个基于模型的控制器提供数据,这时,需要一个高性能的实时平台。Dr. Tobias Bruckmann继续说道:“Beckhoff 的 TwinCAT 3 自动化软件是一个功能强大且经济的解决方案,因为控制器在 Matlab ® /Simulink ® 中实施。它不是学术使用的样机控制系统,因此能够利用成熟的标准组件。”
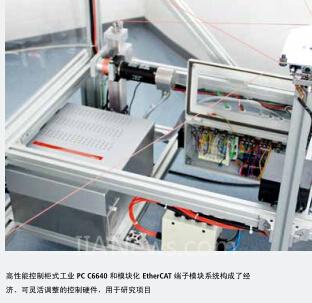
控制柜式 PC C6640 不仅仅为整个控制技术提供了充足的计算性能。它通过 EtherCAT 与传感器和驱动器以及轻型平台的组件进行通讯,如仓储/检索设备和用于精确定位的激光扫描仪。由于绳牵引机器人运行要求极为可靠地测量绳子的力,研究人员使用了具有 XFC 极速控制技术的模拟量输入端子模块 EL3356-0010。正如 Christian Sturm 解释的那样:“为了能够精确移动轻型平台并尽可能地将振动降到最低,需要通过负载单元和 EtherCAT 端子模块 EL3356-0010 测量绳子的张力。然后通过控制算法在 Matlab ® /Simulink ® 中实施这些数值。在这一过程中,超采样系数为 10 的 XFC 超采样功能为我们带来了很大好处。EL3356-0010 具有出色的采样速度,在我们当前的 1 毫秒控制周期下,已经可以提供相当平稳的信号。这样信号就能够在控制器中得到处理,而无需额外处理。此外,参数设置和连接也非常简单,且该端子模块也非常节省成本。”
该控制系统的一个关键优势在于它的工业兼容性。因此,它为研究项目的实际核心部分进行的进一步研究提供了理想的基础 — 控制算法。Dr. Tobias Bruckmann 证实道:“我们需要的不是针对驱动和平台的分布式控制器,而仅仅是一个具有宽数据总线的中央实时 PC,和我们是否要传输测量值到距离仅为 1 米还是 20 米的平台无关。在较早的原型中,数据采集,特别是长距离的电机控制相当复杂。令我们惊奇的是,我们新的大型样机的调试工作竟然如此简单。”另外一个好处是:“Beckhoff 技术在实际应用方面,即批量生产方面,也有很多优势,因为一方面我们可以使用熟悉的 Matlab ® /Simulink ® ,另一方面,我们能够无限使用 IEC 61131-3 语言。由于它具有良好的普遍适用性,无需集成第二套控制系统,例如添加安全功能 — PC 控制在一个平台上已经提供了工业应用所需的一切。”
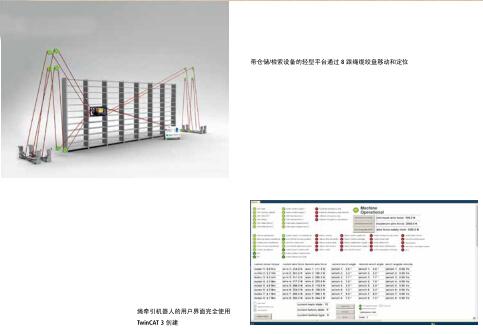

Dr. Tobias Bruckmann 和 Christian Sturm 看到 TwinCAT 3 之所以能够与众不同的两大优点:Matlab ® /Simulink ® 模型可以在也适合于大量设备的高性能工业硬件上运行。此外,硬件可以由价格低廉的模块简单、灵活地构建
TwinCAT 3 的开放性对于开发面向未来的系统是一个里程碑
研究人员认为 TwinCAT 3 与 Matlab ® /Simulink ® 的简单连接是一个真正的里程碑,因为只有这样他们才能够以简单的方式从他们的科学领域访问符合工业标准的系统。此外,通过使用 TwinCAT 3 和 EtherCAT,整个硬件层的结构可以变得非常简单,并可以采用模块化设计。Thomas Maier 阐释道:“所有与 EtherCAT 系统相连的组件都在 TwinCAT 3 下作为硬件映像表示,因此所有设备都可以通过与我们软件模块通讯的方式轻松与控制器链接。此外,系统能够使用更多的 I/O 模块简单且经济地进行扩展,因为与传统的系统相比,可满足各种性能等级要求的EtherCAT 系统成本只占非常小的一部分。
TwinCAT 3 同样也具有未来发展潜力。它对多核技术的支持也特别重要,特别是在工业应用方面,因为必要时,所需的任务,如仓库管理和安全方案,可以外包到它们自己的处理器内核。此外,根据 Bruckmann 所述,通过集成到 Visual Studio ® 获得的开放性也是个很吸引人的优点。高校用户会很愿意使用这一新的编程技术来创建一个完整的项目,从 Visual Studio ® 中的实时编程到可视化。绳牵引机器人项目的下一步是集成用 C/C++ 语言编写的软件模块,这样,就能够访问其它硬件接口,例如一个摄像系统。
(转载)

