
紫金桥软件是通过驱动程序来获得外部数据的,通常情况下驱动程序和紫金桥软件主体安装在一起,驱动程序运行时通过串口、以太网等通讯介质采集外部设备的数据。但是有一些特殊的情况,在使用这种方式的时候就显得有些吃力。比如在采取DDE或OPC时,因为操作系统的原因无法正确配置远程DDE或Dcom,必须把驱动程序装在目标机器上。再比如,因为考虑到系统的安全问题,希望能够通过串口(通过串口采集数据可以有效的隔离各种病毒)来把目标机器上的数据通过DDE或OPC采集出来。在上述的情况下,都需要把紫金桥的驱动程序安装到目标机器上,但是往往用户基于对目标机器的配置或安全考虑(比如,目标机器是比较重要的DCS控制系统),不希望把整个紫金桥软件安装到目标机器上,从而使通常的采集方式无法完成任务。
紫金桥公司针对于这种情况,开发了远程IO数据采集方式,从而解决了上述的问题。这种方式如下图所示:
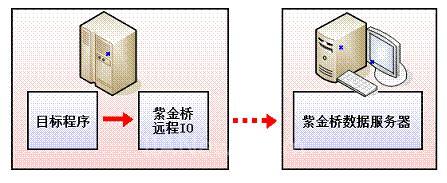
使用这种方式有如下的优点:
(1)只需要在目标机器上复制几个较小的远程数采程序就可以完成数采任务,无需兴师动众的安装整个紫金桥软件,目标机器的维护人员更容易接受。
(2)可以选择串口或以太网两种通讯方式,比较灵活。这样OPC或DDE数据也可以通过串口发送到紫金桥数据库中,增强了系统的安全性。
(3)配置简单,维护方便。在目标机器上只需要配置通讯口等属性,而采集的内容都是在紫金桥数据服务器端配置的,这样只要数据服务器端更改了数采连接,所有的相关的远程数采程序都会自动的更新。
紫金桥远程数采的使用比较简单,下面介绍一下它的使用方法:
(1)远程数采程序在目标计算机上的配置
把紫金桥公司提供的远程数采工具包复制到目标计算机上,文件夹的内容如下图所示:
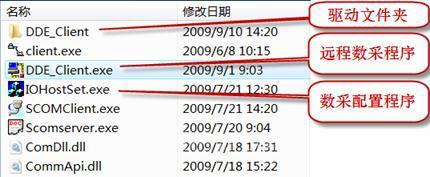
其中驱动文件夹采用紫金桥Io servers文件夹下面的相应的驱动程序的文件夹,从Io servers文件夹下复制过来就行。
远程数采程序需要改名,和驱动文件夹相同,如上图所示。
运行程序,设置远程数采的通讯方式,如下图所示:
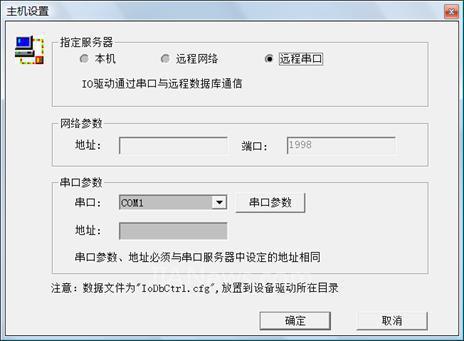
如果选择远程网络方式,指定网址即可。如果更改了端口号,那么数据服务器端也需要进行相同的配置。
如果选择远程串口方式,需要选择相应的串口号,并设置相应的串口的波特率等参数,另外还需要指定一个远程数采的地址。这个地址主要是为了使用一个485线连接多个远程数采时,数据服务器端区分各个远程数采用的。如果一个串口仅连接一个远程数采,写1就行。
点击“确定”按钮即完成了远程数采的配置。
此时运行远程数采程序,它就尝试连接指定的数据服务器,索取需要采集的链接项。
(2)数据服务器端的设置
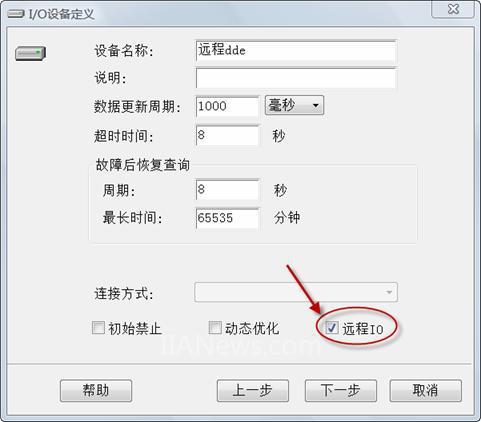
数据服务器端也需要定义设备和组点连接,就好像是数据服务器就在目标机器上一样。不过在定义设备的时候需要指明远程IO项,如下图所示。
如果在配置远程数采的时候采用远程网络方式并指定了特殊的端口,此时就需要在数据服务器端进行网络配置,如下图所示:
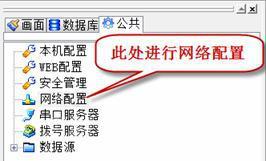
更改端口和远程数采配置相同即可,如下图所示:

如果在配置远程数采的时候采用远程串口方式,就需要在数据服务器端进行串口服务器的配置,如下图所示:
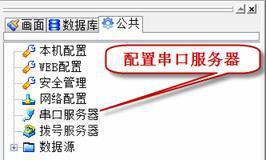
在串口服务器的配置对话框中,增加新的串口设置,串口设置和远程数采设置相同,如下图所示:

(3)运行系统
如果远程数采和数据服务器端配置都正确,那么双方都运行后,就可以正确的建立连接。连接建立之后,远程数采从数据服务器端获得数据连结项,然后进行数采,每个数采周期完毕后,它都会把采集到的数据传送给数据服务器。
如果数据服务器上的数据连接项发生了改变,那么远程数采程序会重新获取数据连接项,整个更改是自动完成的,简化了系统的维护。
一般来说,应该把远程数采程序放到目标计算机的启动列表中,这样只要计算机一启动,远程数采程序就会自动启动,并且不断地试图连接数据服务器,一旦连接上数据服务器,就可以进行正常的数采了。如果在数据采集的过程中,数采服务器退出或者通讯链路中断,远程数采程序会试图重新建立连接,表现出了较好的故障恢复特性。
(转载)

