
在自动化的许多领域,有效性的要求越来越高,因而对自动化系统的容错水平的要求也变得越来越高,尤其在设备停机代价非常大的场合。为了满足这些严格的要求,在DCS系统中通常采用冗余技术,这样才能够满足这些领域所需要的安全性、可靠性和有效性的标准。
在DCS控制系统中,分布处理单元是系统关键的部分。当前这些分布处理单元的控制器往往是基于86系列CPU建构的,这种架构目前被广泛采用。但是由于86系列分布处理单元的特点,导致现在的控制器处理单元存在很多的缺点,如放热量大等。而且在封闭的环境中,这些问题始终很难解决。随着很多低功耗技术的发展和低功耗控制器的出现,分布处理单元的CPU可以有更多的选择,尤其是低功耗的控制器产生很少的热量,且可以使系统的集成度更高。
无论是国内还是国外的DCS控制系统之间有多大区别,冗余技术在这些DCS控制系统中都被广泛采用。DCS控制系统中主要采用了网络冗余技术、分布处理单元冗余技术、IO卡件冗余技术、电源冗余技术等。
1 DCS系统的模型
DCS控制系统是控制技术、计算机技术、通信技术及图形显示技术相结合的产物,其一般的体系结构见图1。由图1 DCS控制系统模型框图可知,DPU指的是分布处理单元。DCS控制系统的体系结构分为3层:过程控制层、监控层和管理层。其中过程控制层是DCS系统控制的基础,其设备的主要功能是控制接口、现场控制单元、检测仪表和执行机构;监控层主要由监控计算机、高级操作站和接口装置构成,主要负责操作监视、系统报警、趋势显示及系统诊断等功能;管理层主要由管理计算机组成,负责整个系统的管理工作。
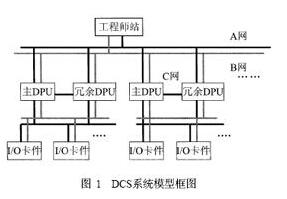
DCS控制系统的冗余设置大部分都与过程控制层和监控层有关,因此大部分的冗余技术都与过程控制层相关。下面结合最新的基于ARM控制器的分布式处理单元,对DCS控制系统中采用的冗余技术中的分布处理单元冗余和网络冗余进行讨论。
2 基于ARM的分布处理单元结构
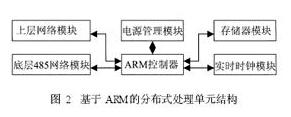
基于ARM的分布处理单元的结构框图见图2,这和一般的分布处理单元的结构非常相似。这里主要把处理单元分为6部分:ARM控制器、上层网络模块、电源管理模块、存储器模块、低层网络模块和时钟模块。ARM控制器和存储模块组成了最基本的嵌入式系统,整个DCS控制系统的数据处理和控制策略都是在这里处理的。上层网络模块主要是指和管理层通信的主/冗余网络和一个实现主/冗余分布处理单元进行数据交换的网络,这部分的主要功能是完成管理层对DCS控制系统的实时检测和实现主/冗余分布处理单元的数据冗余。底层的网络模块是由分为主次的2条485网络组成,此模块主要实现ARM控制器的I/O卡件之间的数据通信。存储器模块可分为两部分,一部分用来管理存放操作系统,另一部分用来管理存放实时数据。电源模块和时钟模块分别实现电源的管理和时钟的管理。
3 控制器冗余
分布式处理单元的冗余根据冗余度可以分为冗余度为1∶1和1∶n两种情况。这在每个DCS厂家的产品中是不同的。这两种方式各有优缺点。这里介绍的是冗余度为1∶1的冗余设置。
分布处理单元冗余度为1∶1,就是将2块组态完全一样的控制器设置成冗余方式。在投入运行时,若出现故障,两分布处理单元之间能实现无扰动切换,保证系统的正常运行。
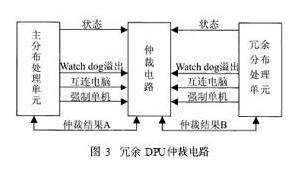
本系统所采用的分布处理单元均带3个网络接口,其中2个网口分别连接到A网和B网,实现各工作站点间的数据通信,第3个网口通过对等网数据连接子分布处理单元间(对等网数据现可选用光纤作传输介质),用来传输主、从分布处理单元之间的备份数据;分布处理单元之间的状态信息由串口传输。冗余分布处理单元与网络的连接见图3。
冗余分布处理单元的工作原理:两个分布处理单元硬件配置完全相同,内部装有相同的操作系统,相同的组态软件,
相同的组态信息。在同一时刻只有1个分布处理单元通过双机交换卡接受过程信息并进行运算处理,最后产生控制结构去控制过程设备,此分布处理单元称为主分布处理单元。同时冗余分布处理单元并没有闲置,它在每一个工作周期都通过双机之间的光纤对主分布处理单元所接受的过程信息和运算结果进行实时拷贝,这样冗余分布处理单元始终与主分布处理单元同步。冗余分布处理单元同时检测拷贝的信息是否完整,是否在所允许的容错度内。一旦信息不完整或报错,则说明主分布处理单元工作不正常。在这种情况下,冗余分布处理单元通过光纤将主分布处理单元旁路,同时切换为主分布处理单元继续工作。切换时间选用最短的运算周期(几十ms或更短),从而实现无扰动切换。等到主分布处理单元恢复正常后,冗余分布处理单元自动把控制权交还给主分布处理单元,转为冗余备份状态。
从图3中可看出双分布处理单元仲裁电路工作原理为将分布处理单元各自自身之诊断结果加到仲裁电路上,并读取相应的仲裁结果,以确定自身之主辅状态。通过编程,确定各状态的优先级,由于双分布处理单元均根据仲裁之结果确定各自之主辅状态,故只要仲裁结果变化了,双分布处理单元则自动进行切换。
(转载)

