
一、概述
在大型水电厂、水库、码头等,起重机是重要的工作设备。经常有多台移动式起重机在同一轨道上工作,由于受到各种影响,司机的视角经常会有死区,不能准确判断与相邻的起重机运行的安全距离,因此在工作时存在起重机之间相互碰撞的安全隐患。
二、控制原理
电气控制采用海为PLC为控制核心,从激光传感器读取距离数据,经处理后与安全限定值进行比较,根据不同的比较结果输出相应的控制策略控制大车行走,从而保证起重机能够安全运行。

三、电气原理图如下:
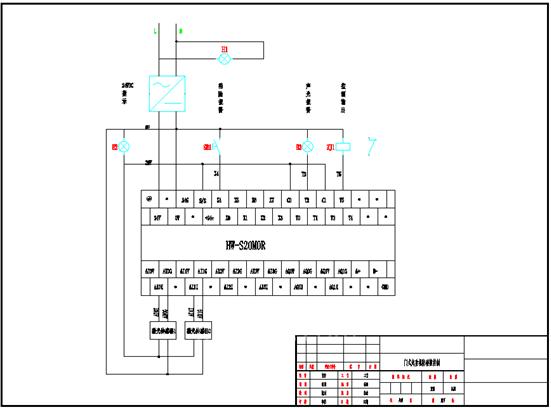
四、控制程序如下:
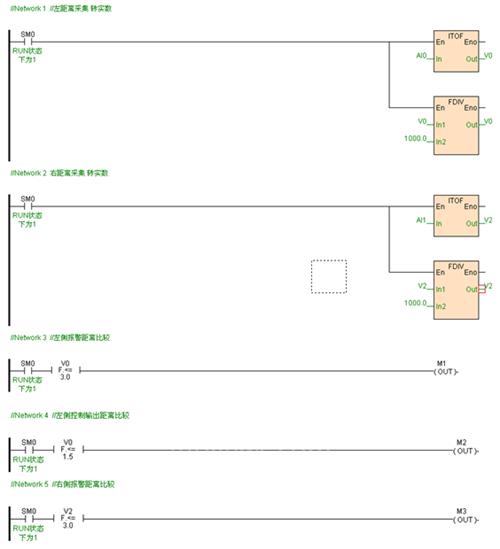
当激光检测距离小于3米时,控制输出报警;
当激光检测距离小于1.5米时,控制继电器输出信号,切断大车行走主回路动力;
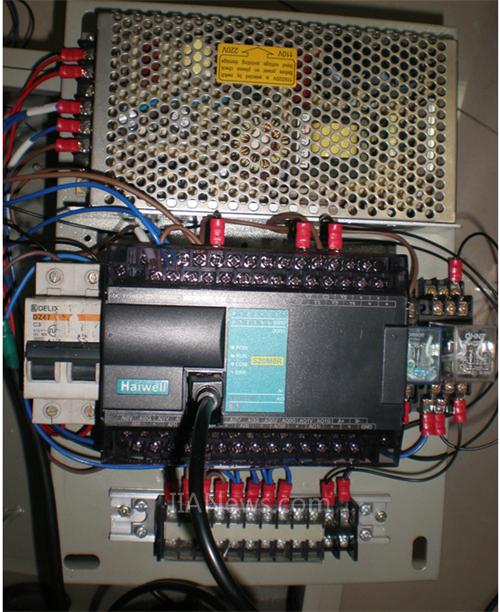
五、现场使用图:
(转载)

