
项目简介:
为了因应更高速高效能的芯片技术,半导体制程的线宽技术不断的演进到奈米等级,在半导体制程中的后段制程,也因此必须提供单位时间内更大量的产出与较短的生产周期。藉由半导体制程所产出的商品涵盖多样化,包含闪存、逻辑芯片、模拟芯片等等,为因应此技术与市场的趋势,在半导体后端制程中,将多个制程整合成为单一机台,简化制程产线的机台种类,亦可以大幅提升制程的周期缩短。且此整合生产的机台也必须提供更高速的生产方式,以及配合影像检测,以减少人工检验的成本与降低错误率,也是一个重要的考虑因素。此项目即在介绍如何将多轴同步的运动控制 - 高速捡拾运动(pick-andplace),再搭配影像检测以解决设备商在雷射打字、检测与包装整合机台的应用。

系统需求:
相较于过去,机台的组成为个别特定功能的机械设备,为了因应整合与高速生产的需求,必须将过去多个特定功能的机器整合成新的设备,将过去多站完成的工作,整合为单一机台即可完成。此时,整合机台的机构复杂度也相对提升,对于机台内的运动控制轴数也会相对的增加许多,包含了步进马达与伺服马达。为此,此项目的客户需求如下:
• 必须采用双核以上的工业计算机,才能符合高速的运算,缩短控制时间的周期
• 因整合了多制程于单一设备,轴控的数目需达30个轴,包含了步进马达与伺服马达
• 在有限的空间内,机台的体积并未因整合的特性而被允许增加许多,所以控制器的配线是一个必须考虑的重点,不仅会影响现场布线的时间与成本,更会影响后续维护工作
• 数位点数可达近千个点
• 在检测部分,需要引入视觉检测,必须搭配轴控的位置比对与触发信号功能,以作为精准的高速连续(on-the-fly)取像
系统概述:
针对客户需求,研华针对有视觉辨识的部分定义为重要(critical)控制区,无影像辨识部分定义为非重要 (non-critical) 控制区,大多数是以步进与伺服马达作为多轴同步同动的搬运行为。研华针对重要控制区建议集中式运动控制组态,与他牌的影像撷取卡做密切的运动与影像之整合。分布式运动控制组态,则可针对非重要控制区提供省配线的优点,同时可以降低控制器本体的大小,此配置可有效的降低客户的建置成本,同时又可兼顾所关心的效能问题。
集中式方式运动控制组态是以研华提供具备SoftMotion技术的六轴控制运动卡PCI-1265为核心,除了针对客户的特殊机构提供客制化函数外,也提供高速位置比与触发信号输出的功能,可在运动不停止的情况下,连续触发他牌影像撷取卡抓取影像,并且实时的利用工业电脑双核处理器的处理效能。
分布式运动控制架构可以针对多轴的部分,提供较为精简的配线方式,同时相较于集中式,可以降低控制卡为单一张通讯主卡,后续的机台维护工作也可以变得较为轻松容易!
专案导入:
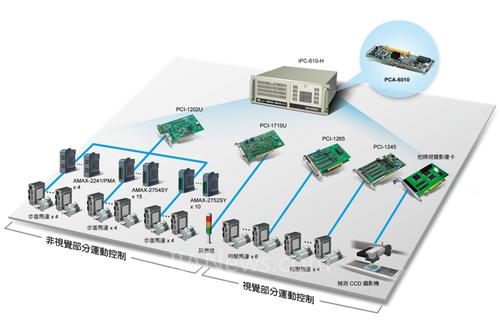
针对以上客户对于项目的要求,研华建议针对机台内两种不同运动控制考虑需求,分为针对视觉部分与非视觉部分提供以下建议方案
IPC-610-H
非视觉部分,轴控数目比较多
PCA-6010 双核单版计算机,具备Intel LGA775,两组Giga LAN与DVI输出
PCI-1202U 2端口AMONet RS-485通讯控制PCI卡
AMAX-2241/PMA 4轴AMONet 伺服运动控制模块,可支持Panasonic Minas A3/A4
AMAX-2750SY系列 AMONet 数字输出/入模块
视觉部分的方案
PCI-1245/1265 DSP-based 4/6轴步进与伺服马达控制泛用型PCI卡
他牌影像撷取卡 可支持Mega pixel的影像撷取卡片
PCI-1710U 100kS/s,12-bit,16信道多功能数据撷取泛用型PCI卡
结论:
研华针对运动控制可分别提供集中与分散方案给客户,在实际应用中也可针对所必须被控制的轴控行为部分加以区分,并且配置出较高的性价比配置方式,既可满足功能需求,同时也可架构一个精简的组态,方便后续控制器得维护工作。此外,研华的运动控制技术是基于SoftMotion,亦可以提供客户客制化的服务,以达到最佳的机构与控制配合的效能需求。
研华强固型的工业计算机系统不但提供一个安全又可靠的平台,多核心的最新技术更有助于多任务处理数据及影像分析,使其达到准确的运算,且高扩充性的背板提供多样化的传输接口,并与各式控制卡、数据撷取卡及影像卡无缝隙整合。
(转载)

