
引言:本文主要介绍了台达最新推出的基于高速运动总线的机械手整体解决方案能够有效的提供解决和满足复杂和可靠的运动控制这一问题。并已经应用在机床上下料协作领域,并配合CNC实现全自动加工的无缝连接。
随着智能无人化工厂的兴起,工业机械人的大量应用,能够有效的解决人工整齐这一难题。各种机床制造商也纷纷转投工业机械人这一新兴产业,去研发相关的机械人设备。但是他们在市场上往往面对的是通用型的控制系统,如PLC+伺服控制系统,这些系统只能构建相对简单的机械手控制,并不能满足复杂和可靠的运动控制。而专用的机械人系统,不但价格高额,而且可开发性不足,又往往不能满足各行各业工艺客制化的需求。本文就介绍了台达最新推出的基于高速运动总线的机械手整体解决方案能够有效的提供解决这一问题。并已经应用在机床上下料协作领域,并配合CNC实现全自动加工的无缝连接。

机床上下料搬运机械手的机械设计和动作要求
这类机械手多为桁架结构,通常由2~4轴直角坐标系机械模组组成,其中X轴为水平轴,多为齿轮齿条设计负责将零件位移到不同的机床工位,而Z轴为垂直轴,多为丝杆结构或者齿轮齿条设计负责将零件提升到安全高度或者下降到机床可装夹高度。如果再配合机械手顶部配合旋转A轴或者B轴机构,还能够实现零件的反转,转向等更多复杂的装夹动作。而X轴 最大行程可到达20米以上,能够满足整条生产线多台机床之间的零件搬运工作。

机床上下料搬运机械手的控制要求
独立性:机床搬运机械手的控制系统往往为独立的控制系统,不依靠机床的控制器进行控制,机械手的运行只需根据预设参数、CNC与机械手之间的I/O信号或者通讯总线交换数据来实现运行,而并会不影响机床运转。
可靠性:对于长距离搬运机械手安装而言,当为齿轮和齿条设计时,X轴和Z轴伺服电机往往安装在行走机构上跟随机械手一起行走,但这样设计因为驱动器和电机距离太远往往会引起编码器线信号衰减问题。而如果将驱动器也安装到行走机构上时,控制器和驱动器之间的命令信号也同样会面临信号衰减、杂讯干扰的风险。所以如何稳定可靠的解决命令传输也是衡量控制系统可靠性的关键因素。
便捷性:同时,当驱动器安装在行走机构上后,使用者往往希望驱动器的体积更小,以减少整个机构安装的空间。
高响应和实时性:对于高端的控制系统还需要诸如,运动坐标实时反馈功能,示教功能,以及可靠度的安全防护功能等。
台达高速运动总线的机械手整体解决方案介绍
1、控制架构的创新
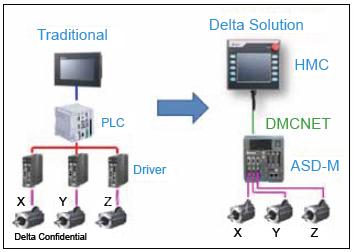
在传统的运动控制架构中,运动控制往往依赖于中央控制器,如PLC单元。同人的神经网络一样,PLC系统扮演者大脑的角色,用户由HMI输入数据,PLC在负责将运动命令通过脉冲方式或者总线方式下达给伺服系统同时,还要处理外部的IO逻辑命令,如急停、高速中断响应等。控制的轴数越多,其PLC的负担越重,处理速度越慢,而且成本也越高。
与传统的控制架构不同,借助于分散式的设计理念,台达机械手解决方案的主要由HMC运动控制器和台达M系列3合1伺服两部分构成,其中HMC控制器相当于HMI人机单元和PLC的综合体,负责完成运动数据的采集、存储和排序,而M系列伺服则相当于3台伺服驱动器和运动处理器的综合体,负责完成运动控制的处理。串联起他们的是台达DMCNET高速运动总线。
这样设计的好处是每个部件都具有独立思考的能力,大大减轻了运动控制器的负担,同时借助于M系列内置了PR内部位置模式和内部插补功能可以独立完成复杂的运动控制,包含机械手单轴运动控制或者多轴插补运动,而不需要上位控制器的参与和协调,这样各个部件间的数据交换量减少,大大减少了多轴控制的扫描时间和提高了整个系统的响应性。
2、台达高速运动总线DMCNET
DMCNET是台达自主的高速运动总线协议,已经被应用在如台达CNC产品、HMC控制器、运动轴卡,AH500PLC运动模块等产品。其通讯速率可以达到单向10M,有效通讯距离可以达到30米,仅单单借助于一根网线就能完成配线,相当于运动数据的高速公路。相对于传统的运动控制方式大大简化了配线方式,这样在机械手控制器安装时就可以有效避免了信号衰减和杂讯干扰的风险,提高了控制系统的实时性和可靠性。
其中HMC控制器借助于DMCNET网络最大可以控制12轴伺服,并且完成12轴的资料更新仅需1ms。使用者可以方便在HMC界面上读取各个运动轴的实时坐标,并借助于控制器自身的安全中断和便利指令来实现机械手各种示教功能,安全功能,微调修正等功能。
台达HMC产品和M系列伺服产品介绍
1、台达HMC产品

台达HMC控制器主要由HMC08-N500S52 8寸面板安装型和HMC07-N500H52 7寸手持单元两种规格构成。HMC控制器集成了PLC处理器和HMI单元,使机械手控制器体积减小,节约了PLC的安装空间。借助于DMCNET运动总线接口连接M系列伺服实现运动数据的交换,利用RS422接口可以连接HMC专用I/O模块来实现逻辑控制。同时借助于以太网接口连接PC可以实现远端ERP数据管理,远程故障诊断等功能。
其中HMC07系列还可以通过外置的专用电缆、limit开关和E-STOP按钮,做到最大10m的便利手持操作和可靠的中断防护,而HMC08系列可以外置MPG电子手轮,能够满足机械手手轮示教功能。
对于开发者而言,借助于台达DOPSoft 软件为开发平台,开发者可以使用台达HMI的编辑方式来设计友好、直观的操作界面,使用兼容于台达PLC的编程指令来规划逻辑控制和运动指令,从而无需去掌握高级的开发语言。同时利用HMC特定规划的运动寄存器,可以将复杂的运动控制指令“化繁为简”为明晰的逻辑控制,并且可以同时运行4个主程序,实现多轴间的分工协作。

2、M系列伺服
M系列伺服是台达A2系列伺服之后最新推出的内置Motion的伺服,它除了兼容A2系列伺服的全部功能外,还具有三轴运动控制功能,其共DSP设计使其能够在不依赖上位机参与协调的情况下独立的来完成3轴螺旋插补。直线插补、两轴圆弧插补等复杂的运动控制。远期,台达在M系列还将规划内置PLC功能和G代码功能使其能够满足更灵活的运动控制方式。

同时因为采用共直流电源设计,只需一组电源接入,一台驱动器就能够同时拖动3颗不同或者相同功率的伺服电机,减少了机械手驱动器的安装空间和配线。
结束语
“显控一体,简捷高效”是台达HMC控制器特色,除了机器手控制领域,在其他产业机器领域HMC同样也可以发挥功能强大,开发便捷的优势。
从远古“木牛流马”开始,人类就一直追随着机器取代人类和超越人类的梦想,随着机器人技术的飞速发展,相信在未来我们也会有更多更好的控制解决方案应运而生。
(转载)

