
引言
机器人根据测试结果对光伏电池进行分拣。用于机器人系统的控制器,包括使用 Beckhoff AM3033 伺服电动机和 AX5000 EtherCAT 伺服驱动的驱动技术,由 IPTE 内部开发。“我们选择了带一个单轴和一个双轴驱动的双驱动系统,非常划算。软件方面,我们使用了由 Beckhoff为其它机器人类型拾放应用开发的 TwinCAT 运动转换软件,”IPTE 的一位软件开发者 Dimitri Paque 解释说。
光伏电池的检查和测试是太阳能电池制造业质量保证的重要环节。在组装到太阳能模块之前,这些电池必须按照多个标准进行检查,其中效率和功率是最重要的。总部位于比利时亨克的 IPTE Factory Automation 已经引入了新 SOL-TS:用于光伏(PV)电池的集成式测试和分拣系统。使用这种高效、紧凑、符合成本效益的解决方案,每小时可处理高达 3,600 个光伏电池。

在光伏电池被组装到太阳能模块之前,它们必须接受 IEC 标准说明的一系列密集测试。其中一项非常重要的参数便是效率和功率的测量。
精确测量需要精确定位
由 IPTE 开发的 SOL-TS 测试和分拣系统由三个单元组成:
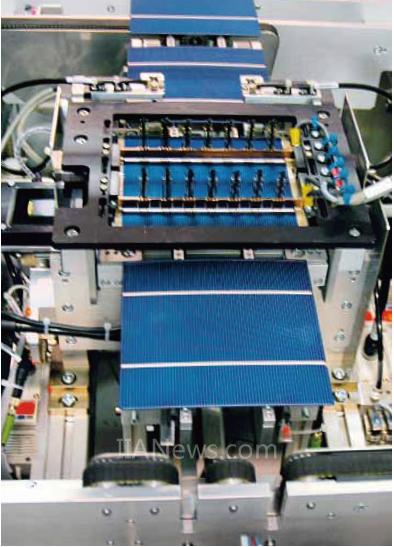
1)电源区、2)测试区和 3)分拣及包装单元。测试单元每小时可处理 3,600 个大小高达 6 x 6 英寸的光伏电池。电池通过由 Beckhoff AS1060 步进电动机驱动的智能输送带输送到测试单元。光伏电池必须精确定位才能进行测试。AAA 级多级太阳模拟器射出的 3 x 10 ms脉冲允许对每个光伏电池上电压和电流的精确测量。与可编程负载连接和进行多重采样使得对光伏电池性能的验证成为了可能。因为光伏电池极其薄(< 200 微米),所以它们必须在受控制的条件下输送和连接。

测试后,光伏电池的测量结果被保存在一个文档中,同时该文档与光伏电池一起传输到分拣系统中以进行后续处理。测量结果也为太阳能模块制造商提供了重要的信息来源。这些数据将在质量测试和追溯系统中使用。
使用 TwinCAT 运动转换软件的机器人控制技术
机器人根据测试结果对光伏电池进行分拣。用于机器人系统的控制器,包括使用 Beckhoff AM3033 伺服电动机和 AX5000 EtherCAT 伺服驱动的驱动技术,由 IPTE 内部开发。“我们选择了带一个单轴和一个双轴驱动的双驱动系统,非常划算。软件方面,我们使用了由 Beckhoff为其它机器人类型拾放应用开发的 TwinCAT 运动转换软件,”IPTE 的一位软件开发者 Dimitri Paque 解释说。“该运动软件非常适合于利用 G代码(DIN 66025)实现运动插补(用于 CNC 机床的标准),”Beckhoff比利时的技术支持Koen Kerkhofs强调说。从笛卡尔数据开始,可以轻松设置机器人设定值,也可以输入用于机械臂动态控制的质量和惯性力矩。
所有的内部 I/O 通信都通过防护等级为 IP67 的 Beckhoff EtherCAT 端子盒模块进行。这带来了紧凑和清晰的电缆布线。光伏电池根据它们的电气特性被分拣并被置于待装运的小型聚苯乙烯容器中。
(转载)

